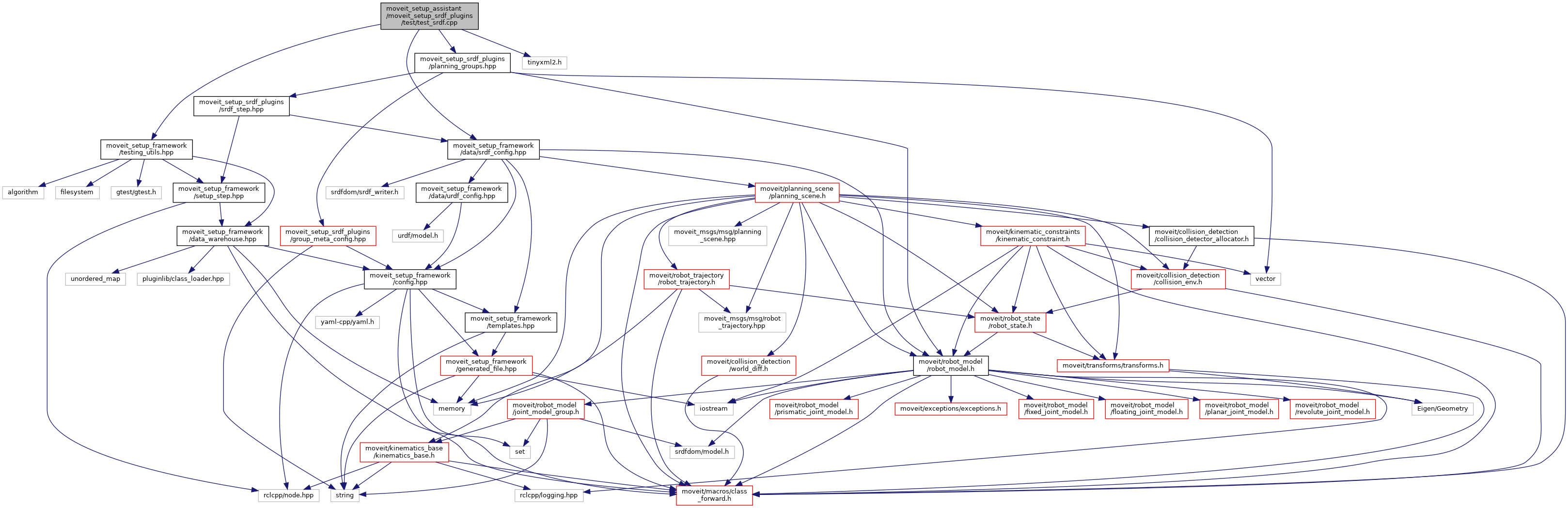
#include <moveit_setup_framework/testing_utils.hpp>#include <moveit_setup_framework/data/srdf_config.hpp>#include <moveit_setup_srdf_plugins/planning_groups.hpp>#include <tinyxml2.h>
Include dependency graph for test_srdf.cpp:
Go to the source code of this file.
Classes | |
| class | SRDFTest |
Functions | |
| unsigned int | countElements (const tinyxml2::XMLNode &parent, const char *child_name) |
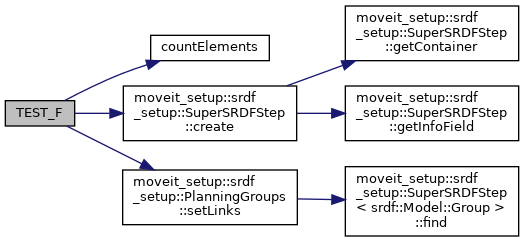
| TEST_F (SRDFTest, Empty) | |
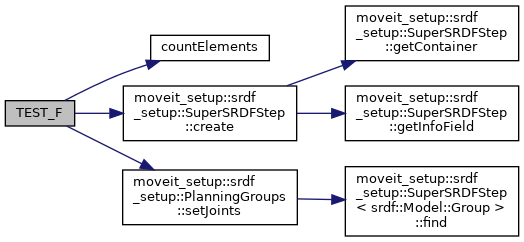
| TEST_F (SRDFTest, SetJoints) | |
| TEST_F (SRDFTest, SetLinks) | |
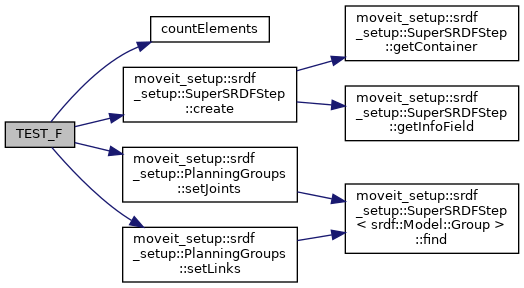
| TEST_F (SRDFTest, SetJointsThenLinks) | |
| int | main (int argc, char **argv) |
Function Documentation
◆ countElements()
| unsigned int countElements | ( | const tinyxml2::XMLNode & | parent, |
| const char * | child_name | ||
| ) |

◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 202 of file test_srdf.cpp.
◆ TEST_F() [1/4]
| TEST_F | ( | SRDFTest | , |
| Empty | |||
| ) |
Definition at line 91 of file test_srdf.cpp.
◆ TEST_F() [2/4]
| TEST_F | ( | SRDFTest | , |
| SetJoints | |||
| ) |
◆ TEST_F() [3/4]
| TEST_F | ( | SRDFTest | , |
| SetJointsThenLinks | |||
| ) |
◆ TEST_F() [4/4]
| TEST_F | ( | SRDFTest | , |
| SetLinks | |||
| ) |