#include "load_test_robot.h"#include <limits>#include <ostream>#include <gtest/gtest.h>#include <moveit/ompl_interface/detail/state_validity_checker.h>#include <moveit/ompl_interface/model_based_planning_context.h>#include <moveit/ompl_interface/parameterization/joint_space/joint_model_state_space.h>#include <moveit/planning_scene/planning_scene.h>#include <ompl/geometric/SimpleSetup.h>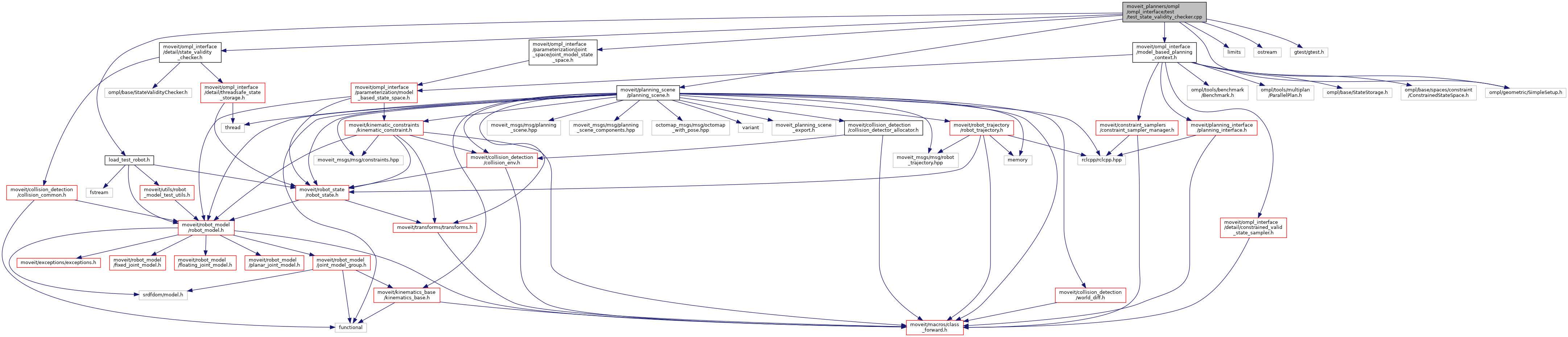
Go to the source code of this file.
Classes | |
| class | TestStateValidityChecker |
| Generic implementation of the tests that can be executed on different robots. More... | |
| class | PandaValidity |
| class | FanucTest |
Functions | |
| std::ostream & | operator<< (std::ostream &os, const std::vector< double > &v) |
| Pretty print std:vectors. More... | |
| TEST_F (PandaValidity, testConstructor) | |
| TEST_F (PandaValidity, testJointLimits) | |
| TEST_F (PandaValidity, testSelfCollision) | |
| TEST_F (PandaValidity, testPathConstraints) | |
| TEST_F (FanucTest, createStateValidityChecker) | |
| TEST_F (FanucTest, testJointLimits) | |
| TEST_F (FanucTest, testSelfCollision) | |
| TEST_F (FanucTest, testPathConstraints) | |
| int | main (int argc, char **argv) |
Variables | |
| constexpr bool | VERBOSE = false |
| This flag sets the verbosity level for the state validity checker. More... | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 333 of file test_state_validity_checker.cpp.
◆ operator<<()
| std::ostream& operator<< | ( | std::ostream & | os, |
| const std::vector< double > & | v | ||
| ) |
Pretty print std:vectors.
Definition at line 71 of file test_state_validity_checker.cpp.
◆ TEST_F() [1/8]
| TEST_F | ( | FanucTest | , |
| createStateValidityChecker | |||
| ) |
Definition at line 306 of file test_state_validity_checker.cpp.
◆ TEST_F() [2/8]
| TEST_F | ( | FanucTest | , |
| testJointLimits | |||
| ) |
Definition at line 311 of file test_state_validity_checker.cpp.
◆ TEST_F() [3/8]
| TEST_F | ( | FanucTest | , |
| testPathConstraints | |||
| ) |
Definition at line 324 of file test_state_validity_checker.cpp.
◆ TEST_F() [4/8]
| TEST_F | ( | FanucTest | , |
| testSelfCollision | |||
| ) |
Definition at line 317 of file test_state_validity_checker.cpp.
◆ TEST_F() [5/8]
| TEST_F | ( | PandaValidity | , |
| testConstructor | |||
| ) |
Definition at line 269 of file test_state_validity_checker.cpp.
◆ TEST_F() [6/8]
| TEST_F | ( | PandaValidity | , |
| testJointLimits | |||
| ) |
Definition at line 274 of file test_state_validity_checker.cpp.
◆ TEST_F() [7/8]
| TEST_F | ( | PandaValidity | , |
| testPathConstraints | |||
| ) |
Definition at line 288 of file test_state_validity_checker.cpp.
◆ TEST_F() [8/8]
| TEST_F | ( | PandaValidity | , |
| testSelfCollision | |||
| ) |
Definition at line 281 of file test_state_validity_checker.cpp.
Variable Documentation
◆ VERBOSE
|
constexpr |
This flag sets the verbosity level for the state validity checker.
This test checks the basics of a StateValidityChecker:
- Can we create one?
- States inside and outside joint limits.
- States that are in self-collision.
- Position constraints on the robot's end-effector link.
It does not yet test:
- Collision with objects in the environment.
- Orientation constraints, visibility constraints, ...
- A user-specified feasibility function in the planning scene.
The test do show what is minimally required to create a working StateValidityChecker.
Definition at line 66 of file test_state_validity_checker.cpp.