#include <gtest/gtest.h>#include <moveit/planning_interface/planning_interface.h>#include <moveit/robot_state/conversions.h>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <rclcpp/logger.hpp>#include "test_utils.h"
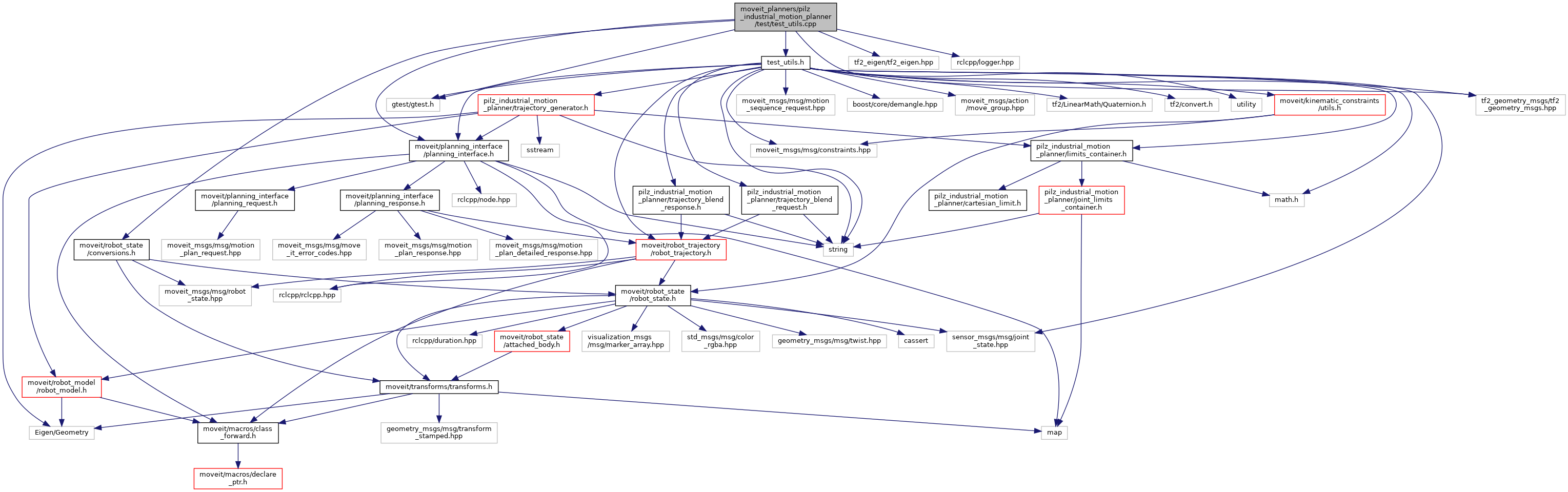
Include dependency graph for test_utils.cpp: