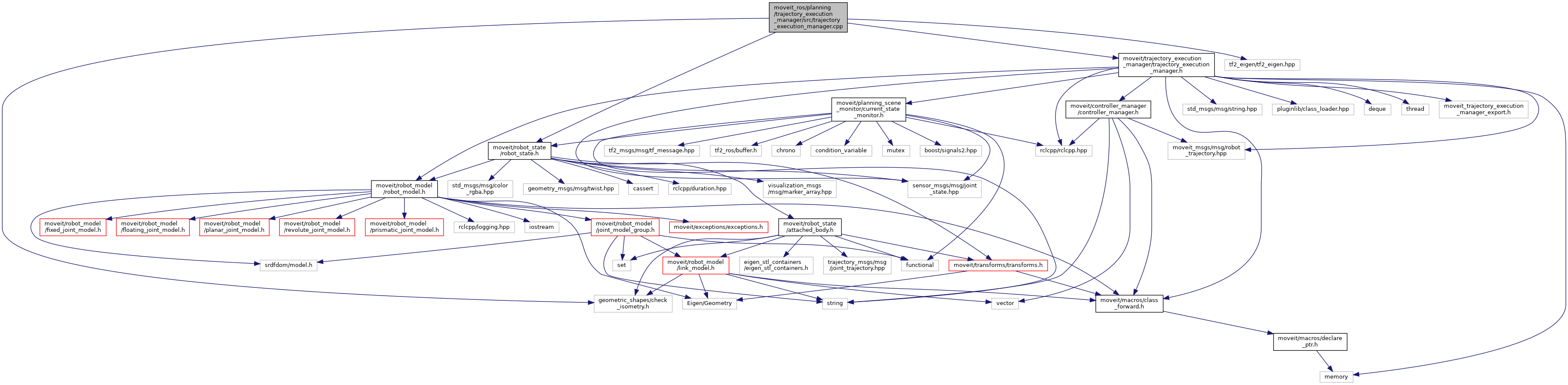
#include <moveit/trajectory_execution_manager/trajectory_execution_manager.h>#include <moveit/robot_state/robot_state.h>#include <geometric_shapes/check_isometry.h>#include <tf2_eigen/tf2_eigen.hpp>#include <rclcpp/qos.hpp>
Include dependency graph for trajectory_execution_manager.cpp:
Go to the source code of this file.
Namespaces | |
| trajectory_execution_manager | |
Variable Documentation
◆ nractive
| std::vector<std::size_t> nractive |
Definition at line 734 of file trajectory_execution_manager.cpp.
◆ nrdefault
| std::vector<std::size_t> nrdefault |
Definition at line 732 of file trajectory_execution_manager.cpp.
◆ nrjoints
| std::vector<std::size_t> nrjoints |
Definition at line 733 of file trajectory_execution_manager.cpp.
◆ selected_options
| std::vector<std::vector<std::string> > selected_options |
Definition at line 731 of file trajectory_execution_manager.cpp.