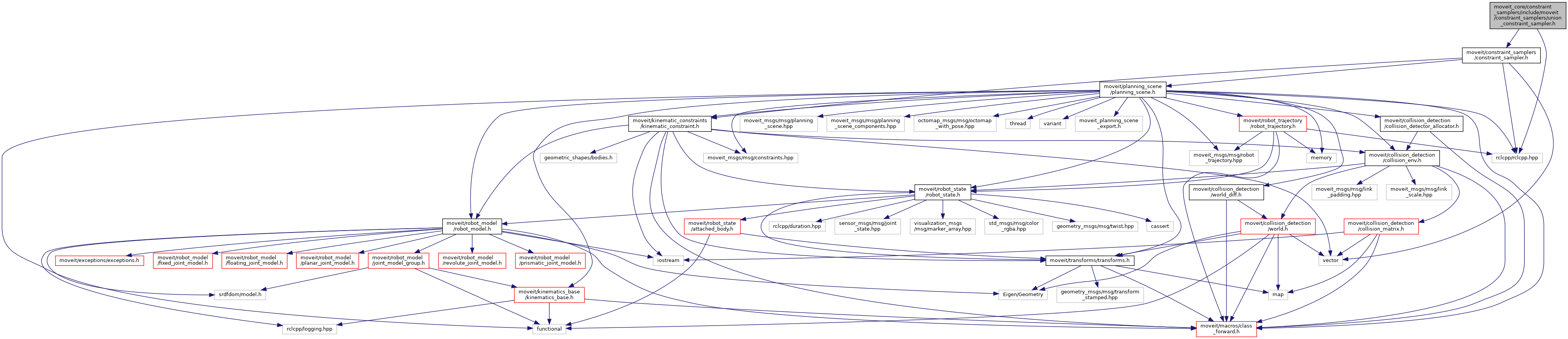
Include dependency graph for union_constraint_sampler.h:
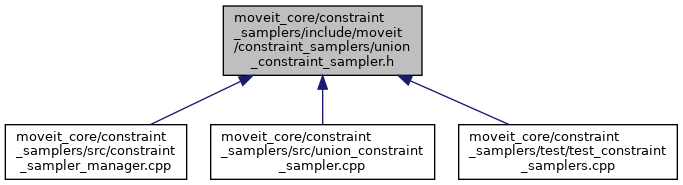
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | constraint_samplers::UnionConstraintSampler |
| This class exists as a union of constraint samplers. It contains a vector of constraint samplers, and will sample from each of them. More... | |
Namespaces | |
| constraint_samplers | |
| The constraint samplers namespace contains a number of methods for generating samples based on a constraint or set of constraints. | |