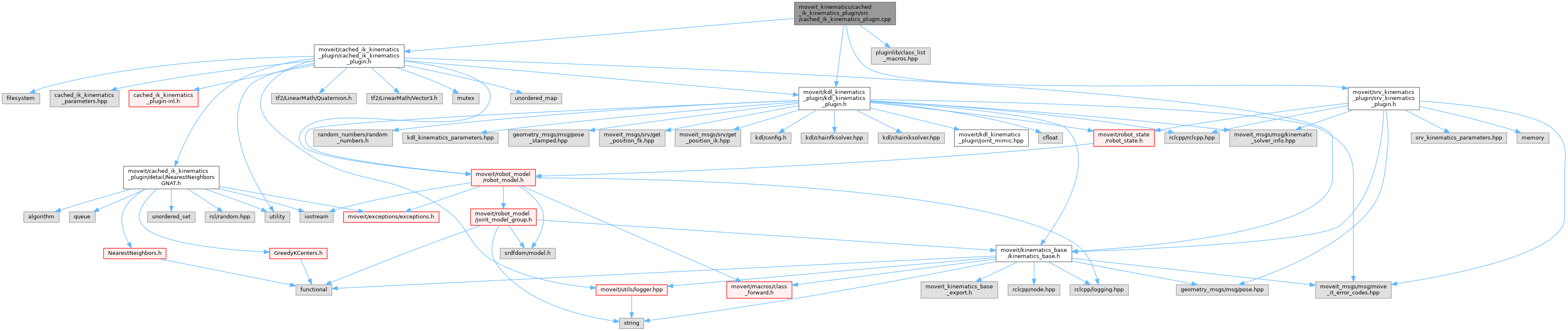
#include <moveit/cached_ik_kinematics_plugin/cached_ik_kinematics_plugin.hpp>#include <moveit/kdl_kinematics_plugin/kdl_kinematics_plugin.hpp>#include <moveit/srv_kinematics_plugin/srv_kinematics_plugin.hpp>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for cached_ik_kinematics_plugin.cpp:
Go to the source code of this file.
Function Documentation
◆ PLUGINLIB_EXPORT_CLASS() [1/2]
| PLUGINLIB_EXPORT_CLASS | ( | cached_ik_kinematics_plugin::CachedIKKinematicsPlugin< kdl_kinematics_plugin::KDLKinematicsPlugin > | , |
| kinematics::KinematicsBase | |||
| ) |
◆ PLUGINLIB_EXPORT_CLASS() [2/2]
| PLUGINLIB_EXPORT_CLASS | ( | cached_ik_kinematics_plugin::CachedIKKinematicsPlugin< srv_kinematics_plugin::SrvKinematicsPlugin > | , |
| kinematics::KinematicsBase | |||
| ) |