Maintain a diff list of changes that have happened to a World. More...
#include <world_diff.hpp>
Public Types | |
| using | const_iterator = std::map< std::string, World::Action >::const_iterator |
Public Member Functions | |
| WorldDiff () | |
| Constructor. | |
| WorldDiff (const WorldPtr &world) | |
| Constructor. | |
| WorldDiff (WorldDiff &other) | |
| copy constructor. | |
| ~WorldDiff () | |
| void | setWorld (const WorldPtr &world) |
| Set which world to record. Records all objects in old world (if any) as DESTROYED and all objects in new world as CREATED and ADD_SHAPE. | |
| void | reset (const WorldPtr &world) |
| Set which world to record. Erases all previously recorded changes. | |
| void | reset () |
| Turn off recording and erase all previously recorded changes. | |
| const std::map< std::string, World::Action > & | getChanges () const |
| Return all the changes that have been recorded. | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| const_iterator | find (const std::string &id) const |
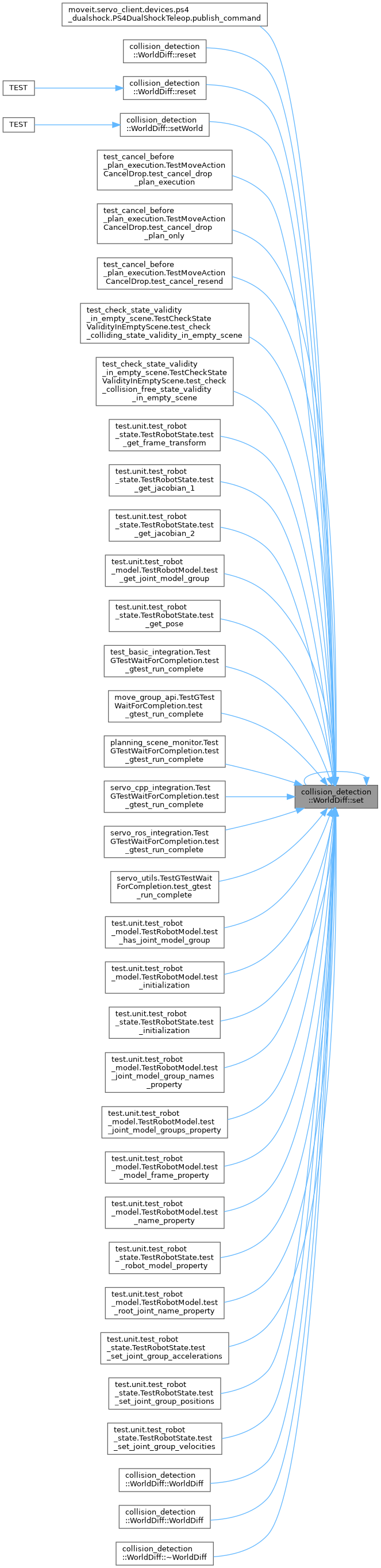
| void | set (const std::string &id, World::Action val) |
| void | clearChanges () |
| Clear the internally maintained vector of changes. | |
Detailed Description
Maintain a diff list of changes that have happened to a World.
Definition at line 47 of file world_diff.hpp.
Member Typedef Documentation
◆ const_iterator
| using collision_detection::WorldDiff::const_iterator = std::map<std::string, World::Action>::const_iterator |
Definition at line 79 of file world_diff.hpp.
Constructor & Destructor Documentation
◆ WorldDiff() [1/3]
| collision_detection::WorldDiff::WorldDiff | ( | ) |
Constructor.
Definition at line 49 of file world_diff.cpp.
◆ WorldDiff() [2/3]
Constructor.
Definition at line 53 of file world_diff.cpp.
◆ WorldDiff() [3/3]
| collision_detection::WorldDiff::WorldDiff | ( | WorldDiff & | other | ) |
copy constructor.
Definition at line 59 of file world_diff.cpp.
◆ ~WorldDiff()
| collision_detection::WorldDiff::~WorldDiff | ( | ) |
Member Function Documentation
◆ begin()
|
inline |
iterator pointing to first change
Definition at line 81 of file world_diff.hpp.
◆ clearChanges()
| void collision_detection::WorldDiff::clearChanges | ( | ) |
Clear the internally maintained vector of changes.
Definition at line 112 of file world_diff.cpp.
◆ end()
|
inline |
iterator pointing to end of changes
Definition at line 86 of file world_diff.hpp.
◆ find()
|
inline |
find changes for a named object
Definition at line 96 of file world_diff.hpp.
◆ getChanges()
|
inline |
Return all the changes that have been recorded.
Definition at line 74 of file world_diff.hpp.
◆ reset() [1/2]
| void collision_detection::WorldDiff::reset | ( | ) |
Turn off recording and erase all previously recorded changes.
Definition at line 72 of file world_diff.cpp.
◆ reset() [2/2]
Set which world to record. Erases all previously recorded changes.
Definition at line 83 of file world_diff.cpp.

◆ set()
|
inline |
set the entry for an id
Definition at line 101 of file world_diff.hpp.
◆ setWorld()
Set which world to record. Records all objects in old world (if any) as DESTROYED and all objects in new world as CREATED and ADD_SHAPE.
Definition at line 96 of file world_diff.cpp.

◆ size()
|
inline |
number of changes stored
Definition at line 91 of file world_diff.hpp.
The documentation for this class was generated from the following files:
- moveit_core/collision_detection/include/moveit/collision_detection/world_diff.hpp
- moveit_core/collision_detection/src/world_diff.cpp