#include <dynamics_solver.hpp>
Public Member Functions | |
| DynamicsSolver (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group_name, const geometry_msgs::msg::Vector3 &gravity_vector) | |
| Initialize the dynamics solver. | |
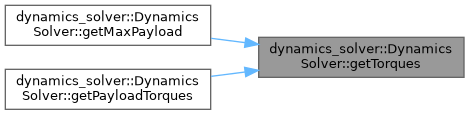
| bool | getTorques (const std::vector< double > &joint_angles, const std::vector< double > &joint_velocities, const std::vector< double > &joint_accelerations, const std::vector< geometry_msgs::msg::Wrench > &wrenches, std::vector< double > &torques) const |
| Get the torques (the order of all input and output is the same as the order of joints for this group in the RobotModel) | |
| bool | getMaxPayload (const std::vector< double > &joint_angles, double &payload, unsigned int &joint_saturated) const |
| Get the maximum payload for this group (in kg). Payload is the weight that this group can hold when the weight is attached to the origin of the last link of this group. (The order of joint_angles vector is the same as the order of joints for this group in the RobotModel) | |
| bool | getPayloadTorques (const std::vector< double > &joint_angles, double payload, std::vector< double > &joint_torques) const |
| Get torques corresponding to a particular payload value. Payload is the weight that this group can hold when the weight is attached to the origin of the last link of this group. | |
| const std::vector< double > & | getMaxTorques () const |
| Get maximum torques for this group. | |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
| Get the kinematic model. | |
| const moveit::core::JointModelGroup * | getGroup () const |
Detailed Description
This solver currently computes the required torques given a joint configuration, velocities, accelerations and external wrenches acting on the links of a robot
Definition at line 58 of file dynamics_solver.hpp.
Constructor & Destructor Documentation
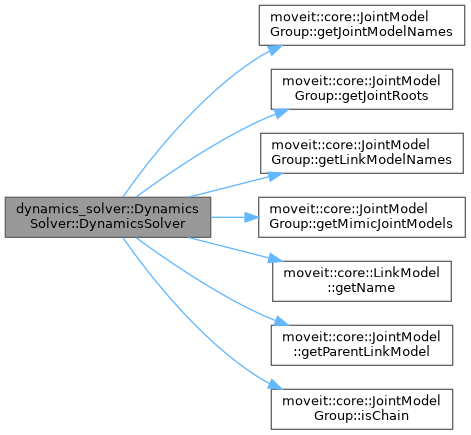
◆ DynamicsSolver()
| dynamics_solver::DynamicsSolver::DynamicsSolver | ( | const moveit::core::RobotModelConstPtr & | robot_model, |
| const std::string & | group_name, | ||
| const geometry_msgs::msg::Vector3 & | gravity_vector | ||
| ) |
Initialize the dynamics solver.
- Parameters
-
urdf_model The urdf model for the robot srdf_model The srdf model for the robot group_name The name of the group to compute stuff for
- Returns
- False if initialization failed
Definition at line 75 of file dynamics_solver.cpp.
Member Function Documentation
◆ getGroup()
|
inline |
Definition at line 131 of file dynamics_solver.hpp.
◆ getMaxPayload()
| bool dynamics_solver::DynamicsSolver::getMaxPayload | ( | const std::vector< double > & | joint_angles, |
| double & | payload, | ||
| unsigned int & | joint_saturated | ||
| ) | const |
Get the maximum payload for this group (in kg). Payload is the weight that this group can hold when the weight is attached to the origin of the last link of this group. (The order of joint_angles vector is the same as the order of joints for this group in the RobotModel)
- Parameters
-
joint_angles The joint angles (desired joint configuration) this must have size = number of joints in the group payload The computed maximum payload joint_saturated The first saturated joint and the maximum payload
- Returns
- False if the input set of joint angles is of the wrong size
Definition at line 225 of file dynamics_solver.cpp.

◆ getMaxTorques()
| const std::vector< double > & dynamics_solver::DynamicsSolver::getMaxTorques | ( | ) | const |
Get maximum torques for this group.
- Returns
- Vector of max torques
Definition at line 326 of file dynamics_solver.cpp.
◆ getPayloadTorques()
| bool dynamics_solver::DynamicsSolver::getPayloadTorques | ( | const std::vector< double > & | joint_angles, |
| double | payload, | ||
| std::vector< double > & | joint_torques | ||
| ) | const |
Get torques corresponding to a particular payload value. Payload is the weight that this group can hold when the weight is attached to the origin of the last link of this group.
- Parameters
-
joint_angles The joint angles (desired joint configuration) this must have size = number of joints in the group payload The payload for which to compute torques (in kg) joint_torques The resulting joint torques
- Returns
- False if the input vectors are of the wrong size
Definition at line 290 of file dynamics_solver.cpp.

◆ getRobotModel()
|
inline |
◆ getTorques()
| bool dynamics_solver::DynamicsSolver::getTorques | ( | const std::vector< double > & | joint_angles, |
| const std::vector< double > & | joint_velocities, | ||
| const std::vector< double > & | joint_accelerations, | ||
| const std::vector< geometry_msgs::msg::Wrench > & | wrenches, | ||
| std::vector< double > & | torques | ||
| ) | const |
Get the torques (the order of all input and output is the same as the order of joints for this group in the RobotModel)
- Parameters
-
joint_angles The joint angles (desired joint configuration) this must have size = number of joints in the group joint_velocities The desired joint velocities this must have size = number of joints in the group joint_accelerations The desired joint accelerations this must have size = number of joints in the group wrenches External wrenches acting on the links of the robot this must have size = number of links in the group torques Computed set of torques are filled in here this must have size = number of joints in the group
- Returns
- False if any of the input vectors are of the wrong size
Definition at line 154 of file dynamics_solver.cpp.
The documentation for this class was generated from the following files:
- moveit_core/dynamics_solver/include/moveit/dynamics_solver/dynamics_solver.hpp
- moveit_core/dynamics_solver/src/dynamics_solver.cpp