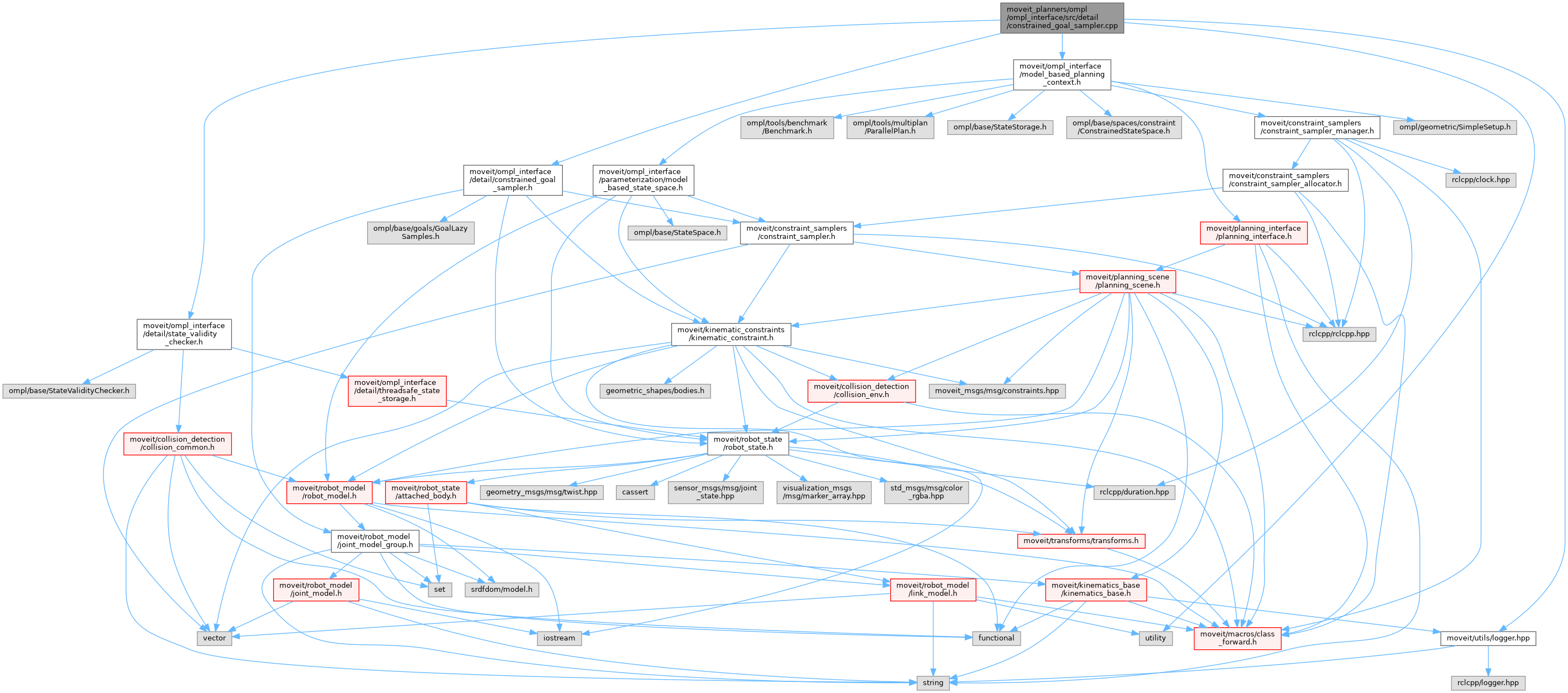
#include <moveit/ompl_interface/detail/constrained_goal_sampler.hpp>#include <moveit/ompl_interface/model_based_planning_context.hpp>#include <moveit/ompl_interface/detail/state_validity_checker.hpp>#include <moveit/utils/logger.hpp>#include <utility>
Include dependency graph for constrained_goal_sampler.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | ompl_interface |
| The MoveIt interface to OMPL. | |