#include "moveit_core/collision_detection/collision_common.hpp"#include "moveit_core/collision_detection/collision_matrix.hpp"#include "moveit_core/collision_detection/world.hpp"#include "moveit_core/controller_manager/controller_manager.hpp"#include "moveit_core/kinematic_constraints/utils.hpp"#include "moveit_core/planning_interface/planning_response.hpp"#include "moveit_core/planning_scene/planning_scene.hpp"#include "moveit_core/robot_model/joint_model.hpp"#include "moveit_core/robot_model/joint_model_group.hpp"#include "moveit_core/robot_model/robot_model.hpp"#include "moveit_core/robot_state/robot_state.hpp"#include "moveit_core/robot_trajectory/robot_trajectory.hpp"
Include dependency graph for core.cpp:

Go to the source code of this file.
Functions | |
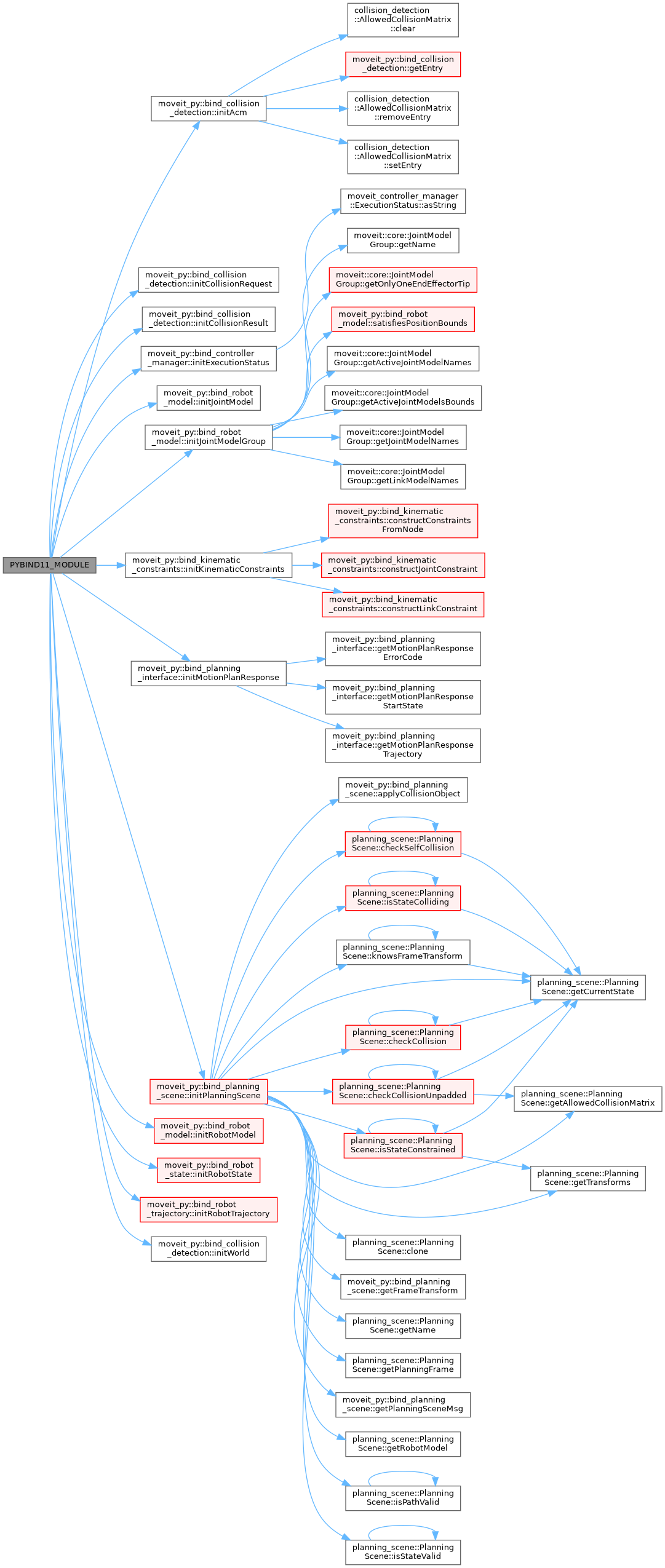
| PYBIND11_MODULE (core, m) | |