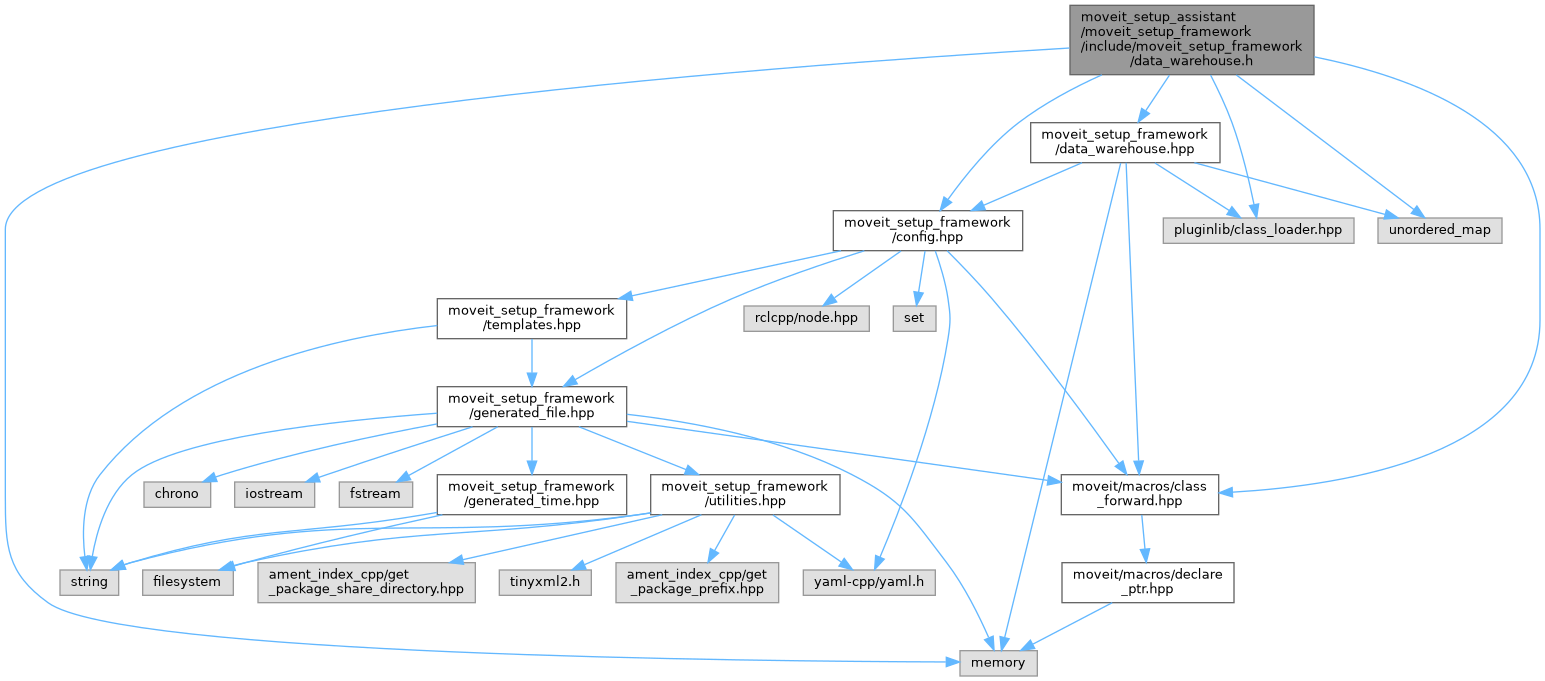
#include <moveit_setup_framework/config.hpp>#include <moveit/macros/class_forward.hpp>#include <pluginlib/class_loader.hpp>#include <unordered_map>#include <memory>#include <moveit_setup_framework/data_warehouse.hpp>
Include dependency graph for data_warehouse.h: