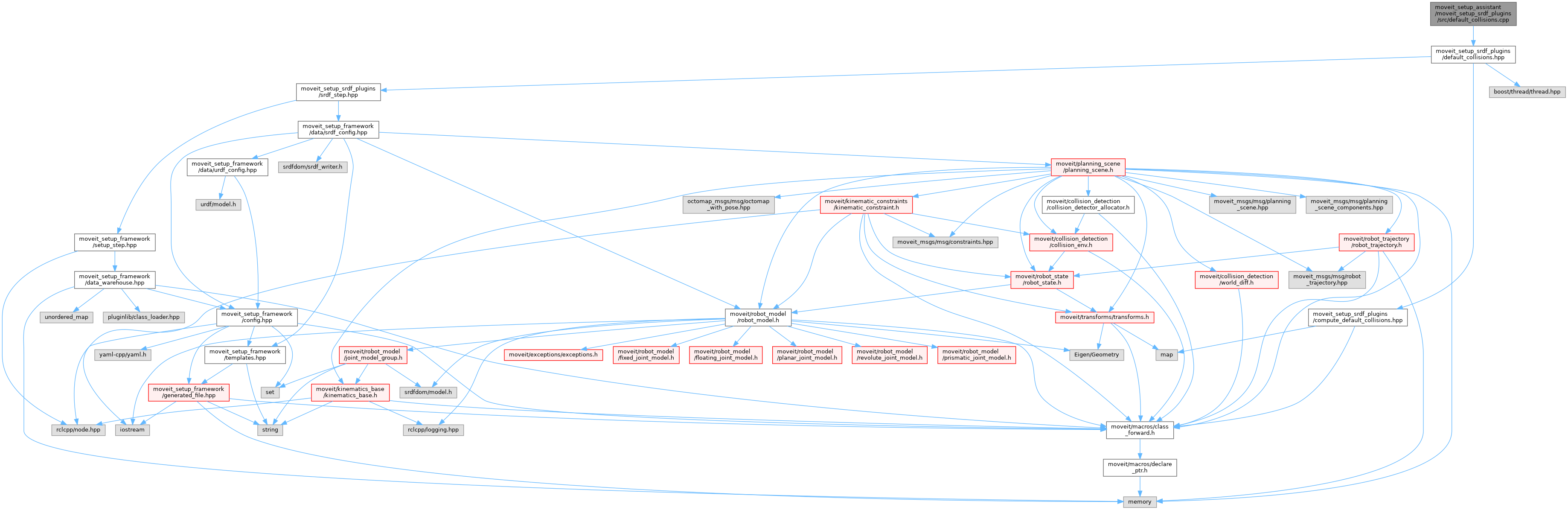
Include dependency graph for default_collisions.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_setup |
| namespace | moveit_setup::srdf_setup |
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
Go to the source code of this file.
Namespaces | |
| namespace | moveit_setup |
| namespace | moveit_setup::srdf_setup |