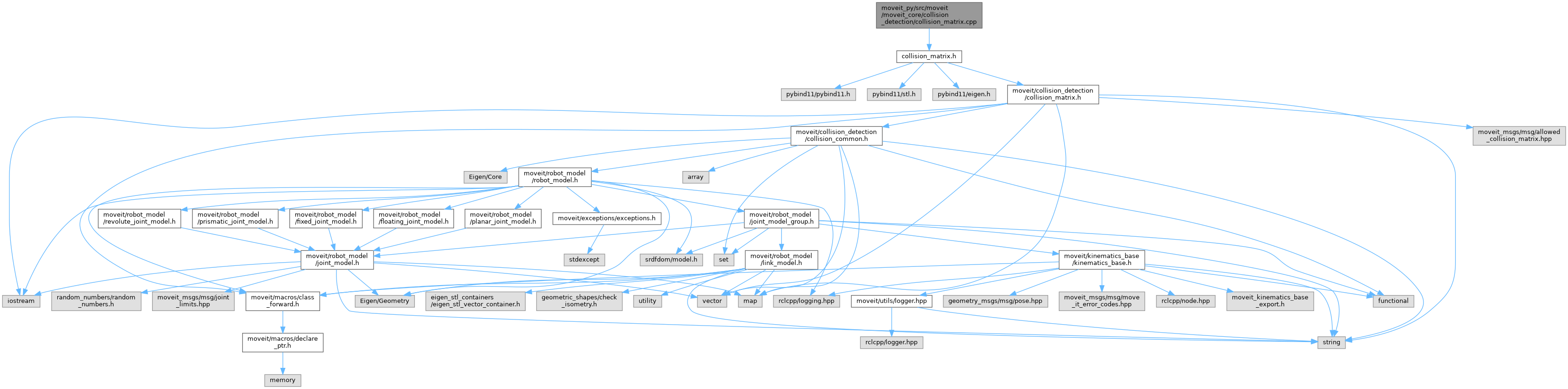
#include "collision_matrix.h"
Include dependency graph for collision_matrix.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_py |
| namespace | moveit_py::bind_collision_detection |
Functions | |
| std::pair< bool, std::string > | moveit_py::bind_collision_detection::getEntry (const collision_detection::AllowedCollisionMatrix &acm, const std::string &name1, const std::string &name2) |
| void | moveit_py::bind_collision_detection::initAcm (py::module &m) |