#include <pybind11/pybind11.h>#include <pybind11/stl.h>#include <pybind11/eigen.h>#include <moveit_py/moveit_py_utils/copy_ros_msg.h>#include <tf2_eigen/tf2_eigen.hpp>#include <moveit/robot_state/robot_state.h>
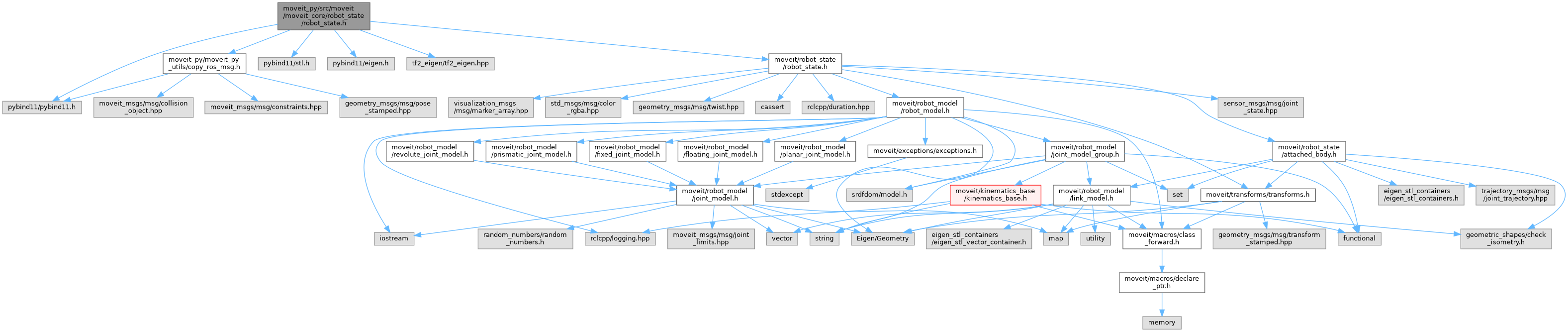
Include dependency graph for robot_state.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | moveit_py |
| namespace | moveit_py::bind_robot_state |
Functions | |
| void | moveit_py::bind_robot_state::update (moveit::core::RobotState *self, bool force, std::string &category) |
| Eigen::MatrixXd | moveit_py::bind_robot_state::getFrameTransform (const moveit::core::RobotState *self, std::string &frame_id) |
| Eigen::MatrixXd | moveit_py::bind_robot_state::getGlobalLinkTransform (const moveit::core::RobotState *self, std::string &link_name) |
| geometry_msgs::msg::Pose | moveit_py::bind_robot_state::getPose (const moveit::core::RobotState *self, const std::string &link_name) |
| Eigen::VectorXd | moveit_py::bind_robot_state::copyJointGroupPositions (const moveit::core::RobotState *self, const std::string &joint_model_group_name) |
| Eigen::VectorXd | moveit_py::bind_robot_state::copyJointGroupVelocities (const moveit::core::RobotState *self, const std::string &joint_model_group_name) |
| Eigen::VectorXd | moveit_py::bind_robot_state::copyJointGroupAccelerations (const moveit::core::RobotState *self, const std::string &joint_model_group_name) |
| Eigen::MatrixXd | moveit_py::bind_robot_state::getJacobian (const moveit::core::RobotState *self, const std::string &joint_model_group_name, const std::string &link_model_name, const Eigen::Vector3d &reference_point_position, bool use_quaternion_representation) |
| Eigen::MatrixXd | moveit_py::bind_robot_state::getJacobian (const moveit::core::RobotState *self, const std::string &joint_model_group_name, const Eigen::Vector3d &reference_point_position) |
| bool | moveit_py::bind_robot_state::setToDefaultValues (moveit::core::RobotState *self, const std::string &joint_model_group_name, const std::string &state_name) |
| void | moveit_py::bind_robot_state::initRobotState (py::module &m) |