Classes | |
| class | PackageNotFoundError |
Functions | |
| get_package_share_directory (pkg_name) | |
| create_parser () | |
| populate_optional (args) | |
| print_args (args) | |
| update_deps (reqd_deps, req_type, e_parent) | |
| validate_openrave_version (args) | |
| xmlElement (name, text=None, **attributes) | |
| create_parameter_dict () | |
| create_ikfast_package (args) | |
| find_template_dir () | |
| update_ikfast_package (args) | |
| update_moveit_package (args) | |
| copy_file (src_path, dest_path, description, replacements=None) | |
| main () | |
Variables | |
| str | plugin_gen_pkg = "moveit_kinematics" |
| list | search_modes = ["OPTIMIZE_MAX_JOINT", "OPTIMIZE_FREE_JOINT"] |
Function Documentation
◆ copy_file()
| create_ikfast_moveit_plugin.copy_file | ( | src_path, | |
| dest_path, | |||
| description, | |||
replacements = None |
|||
| ) |
Definition at line 507 of file create_ikfast_moveit_plugin.py.


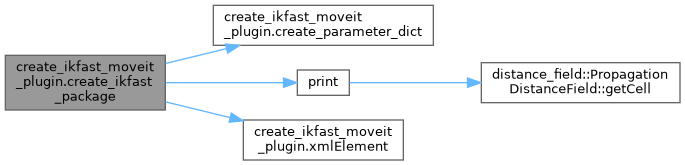
◆ create_ikfast_package()
| create_ikfast_moveit_plugin.create_ikfast_package | ( | args | ) |
Definition at line 197 of file create_ikfast_moveit_plugin.py.
◆ create_parameter_dict()
| create_ikfast_moveit_plugin.create_parameter_dict | ( | ) |
Definition at line 184 of file create_ikfast_moveit_plugin.py.

◆ create_parser()
| create_ikfast_moveit_plugin.create_parser | ( | ) |
Definition at line 81 of file create_ikfast_moveit_plugin.py.

◆ find_template_dir()
| create_ikfast_moveit_plugin.find_template_dir | ( | ) |
Definition at line 252 of file create_ikfast_moveit_plugin.py.

◆ get_package_share_directory()
| create_ikfast_moveit_plugin.get_package_share_directory | ( | pkg_name | ) |
Definition at line 71 of file create_ikfast_moveit_plugin.py.
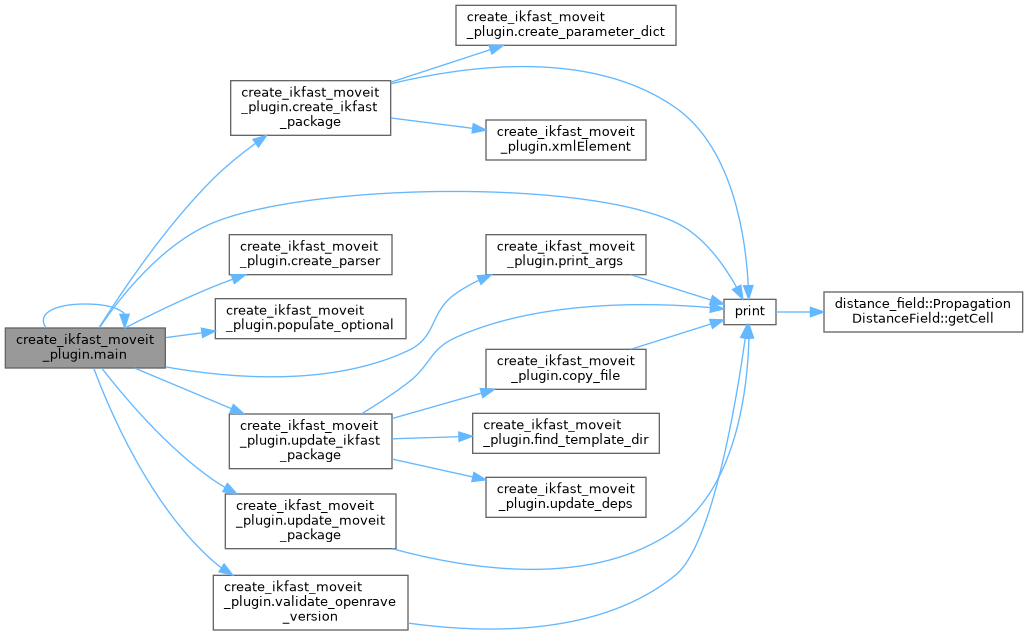
◆ main()
| create_ikfast_moveit_plugin.main | ( | ) |
Definition at line 526 of file create_ikfast_moveit_plugin.py.

◆ populate_optional()
| create_ikfast_moveit_plugin.populate_optional | ( | args | ) |
Definition at line 125 of file create_ikfast_moveit_plugin.py.

◆ print_args()
| create_ikfast_moveit_plugin.print_args | ( | args | ) |
Definition at line 134 of file create_ikfast_moveit_plugin.py.


◆ update_deps()
| create_ikfast_moveit_plugin.update_deps | ( | reqd_deps, | |
| req_type, | |||
| e_parent | |||
| ) |
Definition at line 149 of file create_ikfast_moveit_plugin.py.

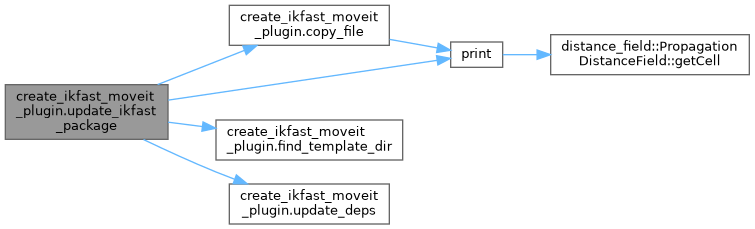
◆ update_ikfast_package()
| create_ikfast_moveit_plugin.update_ikfast_package | ( | args | ) |
Definition at line 265 of file create_ikfast_moveit_plugin.py.
◆ update_moveit_package()
| create_ikfast_moveit_plugin.update_moveit_package | ( | args | ) |
Definition at line 455 of file create_ikfast_moveit_plugin.py.

◆ validate_openrave_version()
| create_ikfast_moveit_plugin.validate_openrave_version | ( | args | ) |
Definition at line 156 of file create_ikfast_moveit_plugin.py.


◆ xmlElement()
| create_ikfast_moveit_plugin.xmlElement | ( | name, | |
text = None, |
|||
| ** | attributes | ||
| ) |
Definition at line 178 of file create_ikfast_moveit_plugin.py.

Variable Documentation
◆ plugin_gen_pkg
| str create_ikfast_moveit_plugin.plugin_gen_pkg = "moveit_kinematics" |
Definition at line 76 of file create_ikfast_moveit_plugin.py.
◆ search_modes
| list create_ikfast_moveit_plugin.search_modes = ["OPTIMIZE_MAX_JOINT", "OPTIMIZE_FREE_JOINT"] |
Definition at line 78 of file create_ikfast_moveit_plugin.py.