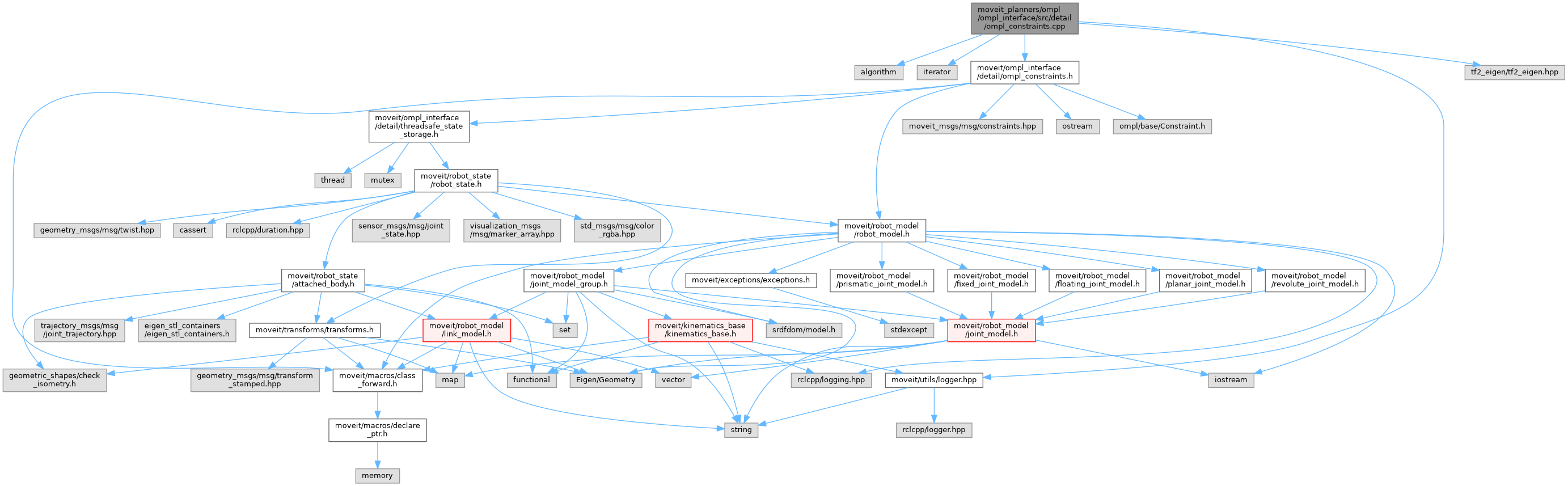
#include <algorithm>#include <iterator>#include <moveit/ompl_interface/detail/ompl_constraints.hpp>#include <moveit/utils/logger.hpp>#include <tf2_eigen/tf2_eigen.hpp>
Include dependency graph for ompl_constraints.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | ompl_interface |
| The MoveIt interface to OMPL. | |
Functions | |
| std::ostream & | ompl_interface::operator<< (std::ostream &os, const ompl_interface::Bounds &bounds) |
| Pretty printing of bounds. | |
| Bounds | ompl_interface::positionConstraintMsgToBoundVector (const moveit_msgs::msg::PositionConstraint &pos_con) |
| Extract position constraints from the MoveIt message. | |
| Bounds | ompl_interface::orientationConstraintMsgToBoundVector (const moveit_msgs::msg::OrientationConstraint &ori_con) |
| Extract orientation constraints from the MoveIt message. | |
| ompl::base::ConstraintPtr | ompl_interface::createOMPLConstraints (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const moveit_msgs::msg::Constraints &constraints) |
| Factory to create constraints based on what is in the MoveIt constraint message. | |