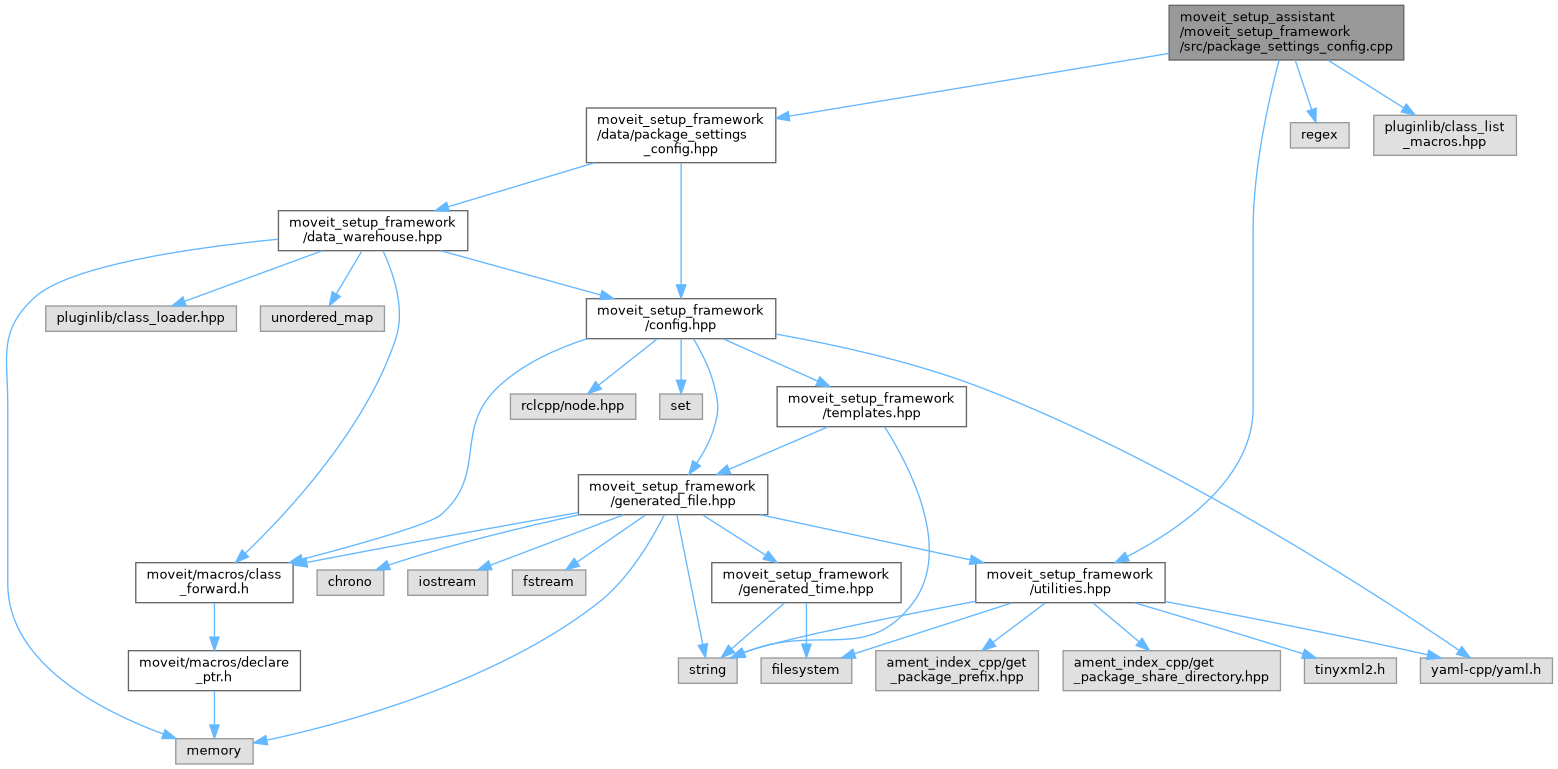
#include <moveit_setup_framework/data/package_settings_config.hpp>#include <moveit_setup_framework/utilities.hpp>#include <regex>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for package_settings_config.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_setup |
Functions | |
| const std::unordered_map< std::string, std::string > | moveit_setup::BACKWARDS_KEY_LOOKUP ({ { "urdf", "URDF" }, { "srdf", "SRDF" }, { "package_settings", "CONFIG" } }) |
| const std::regex | moveit_setup::MAIL_REGEX ("\\b[A-Z0-9._%+-]+@[A-Z0-9.-]+\\.[A-Z]{2,63}\\b", std::regex::icase) |