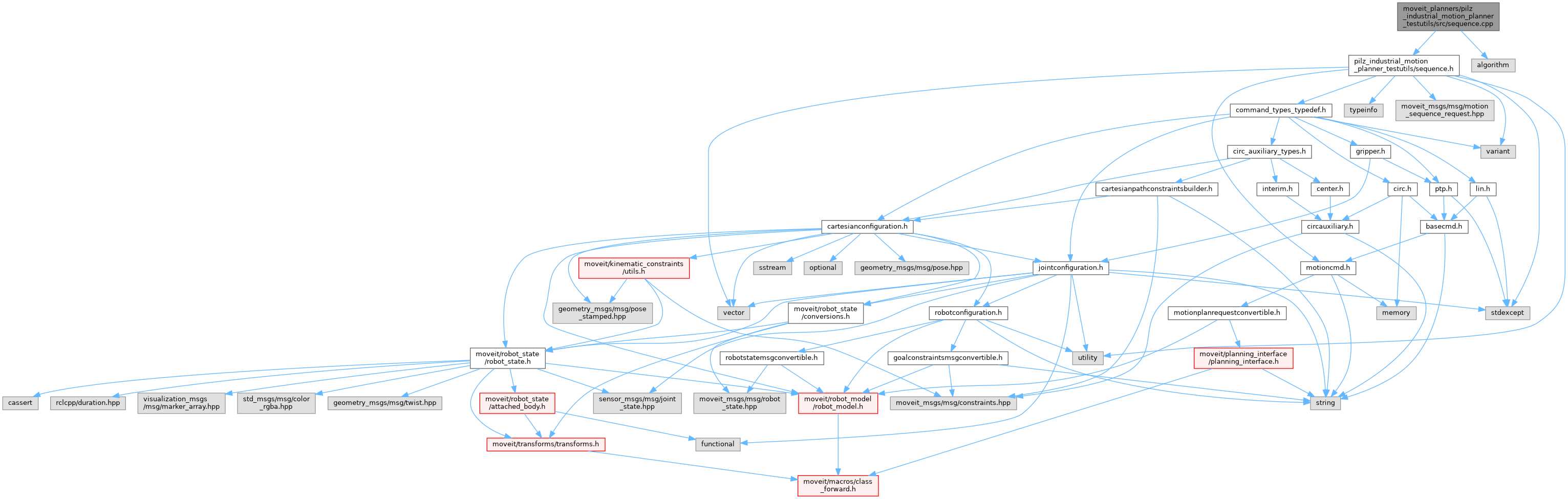
Include dependency graph for sequence.cpp:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner_testutils::ToReqVisitor |
| Visitor transforming the stored command into a MotionPlanRequest. More... | |
| class | pilz_industrial_motion_planner_testutils::ToBaseVisitor |
| Visitor returning not the specific command type but the base type. More... | |
Namespaces | |
| namespace | pilz_industrial_motion_planner_testutils |