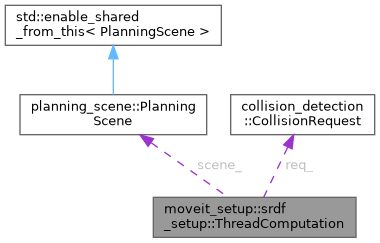
Collaboration diagram for moveit_setup::srdf_setup::ThreadComputation:
Public Member Functions | |
| ThreadComputation (planning_scene::PlanningScene &scene, const collision_detection::CollisionRequest &req, int thread_id, int num_trials, StringPairSet *links_seen_colliding, std::mutex *lock, unsigned int *progress) | |
Public Attributes | |
| planning_scene::PlanningScene & | scene_ |
| const collision_detection::CollisionRequest & | req_ |
| int | thread_id_ |
| unsigned int | num_trials_ |
| StringPairSet * | links_seen_colliding_ |
| std::mutex * | lock_ |
| unsigned int * | progress_ |
Detailed Description
Definition at line 71 of file compute_default_collisions.cpp.
Constructor & Destructor Documentation
◆ ThreadComputation()
|
inline |
Definition at line 73 of file compute_default_collisions.cpp.
Member Data Documentation
◆ links_seen_colliding_
| StringPairSet* moveit_setup::srdf_setup::ThreadComputation::links_seen_colliding_ |
Definition at line 89 of file compute_default_collisions.cpp.
◆ lock_
| std::mutex* moveit_setup::srdf_setup::ThreadComputation::lock_ |
Definition at line 90 of file compute_default_collisions.cpp.
◆ num_trials_
| unsigned int moveit_setup::srdf_setup::ThreadComputation::num_trials_ |
Definition at line 88 of file compute_default_collisions.cpp.
◆ progress_
| unsigned int* moveit_setup::srdf_setup::ThreadComputation::progress_ |
Definition at line 91 of file compute_default_collisions.cpp.
◆ req_
| const collision_detection::CollisionRequest& moveit_setup::srdf_setup::ThreadComputation::req_ |
Definition at line 86 of file compute_default_collisions.cpp.
◆ scene_
| planning_scene::PlanningScene& moveit_setup::srdf_setup::ThreadComputation::scene_ |
Definition at line 85 of file compute_default_collisions.cpp.
◆ thread_id_
| int moveit_setup::srdf_setup::ThreadComputation::thread_id_ |
Definition at line 87 of file compute_default_collisions.cpp.
The documentation for this struct was generated from the following file:
- moveit_setup_assistant/moveit_setup_srdf_plugins/src/compute_default_collisions.cpp