Dual Arms with MoveIt
There are quite a few configuration steps to control two or more manipulators with MoveIt. Luckily it has gotten easier over time. Here, an example is provided and we list all the changes needed to go from 1 robot to X robots.
The launch and configuration files in this example are available here.
Running the Demo
Let’s jump right in. Run:
ros2 launch dual_arm_panda_moveit_config demo.launch.py
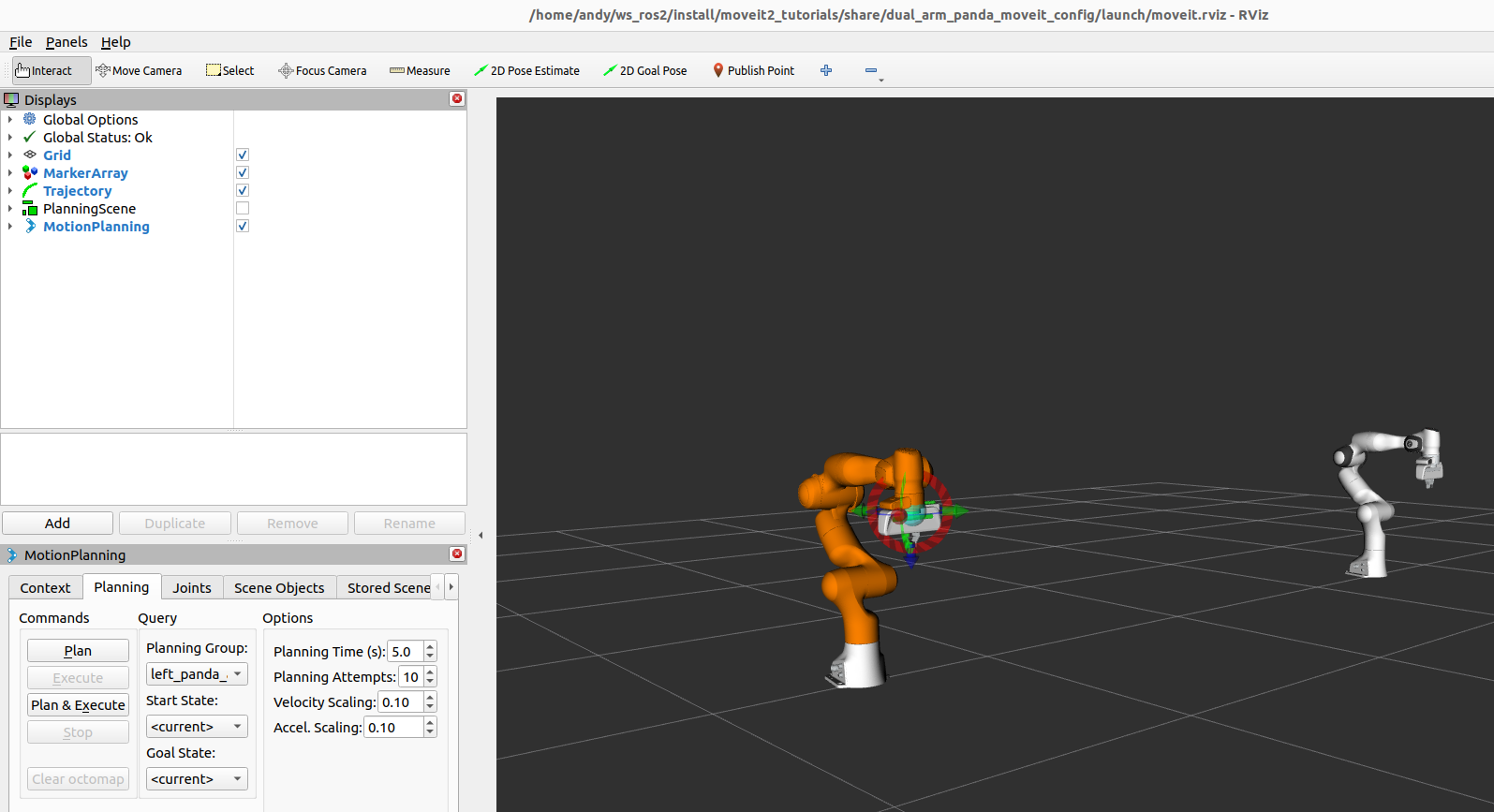
You should see RViz come up with a dual-arm system. In the drop-down menu you can select either left_panda_arm or right_panda_arm, and you can Plan and Execute motions with either one.
What Changes were required for the Dual-Arm System?
A prefix argument was added to the Panda arm xacro,
panda_arm_macro.urdf.xacro. Now all links and joints are prepended withleft_orright_.Add
left_initial_positions.yamlandright_initial_positions.yaml. (This is only necessary when simulating – it doesn’t apply when a hardware robot is used.) Pass aleft_orright_prefix topanda.ros2_control.xacroto select this file.Ensure all joints in
panda.ros2_control.xacroare prepended by theprefixarg so they will be unique for the left and right arms.Ensure the name of the ros2_control macro is prepended with
prefixas well, so it is unique:<ros2_control name="${prefix}${name}" type="system">
Enumerate the controllers we will need for both arms in the ros2_control config file,
ros2_controllers.yaml. Make sure these controllers are launched fromdemo.launch.py.Define joint groups for each arm in
panda.srdf. This tells MoveIt which joints constitute each arm. The joint groups are namedleft_panda_armandright_panda_arm. Also define an end effector for each arm.Define a kinematics solver for each arm in
kinematics.yaml.Define the controllers which MoveIt can execute trajectories with in
moveit_controllers.yaml. Here we have a trajectory controller for each arm.Also in
moveit_controllers.yaml, define the controller management strategy MoveIt will use. The simplest option from a configuration standpoint ismoveit_ros_control_interface/Ros2ControlManager. You can also use amoveit_simple_controller_manager/MoveItSimpleControllerManageralthough it requires additional namespacing and additional enumeration of the joints.