#include <BenchmarkOptions.h>
Public Member Functions | |
| BenchmarkOptions () | |
| Constructor. More... | |
| BenchmarkOptions (const rclcpp::Node::SharedPtr &node) | |
| Constructor accepting a custom namespace for parameter lookup. More... | |
| virtual | ~BenchmarkOptions () |
| Destructor. More... | |
| const std::string & | getHostName () const |
| Set the ROS namespace the node handle should use for parameter lookup. More... | |
| int | getPort () const |
| Get the port of the warehouse database host server. More... | |
| const std::string & | getSceneName () const |
| Get the reference name of the planning scene stored inside the warehouse database. More... | |
| int | getNumRuns () const |
| Get the specified number of benchmark query runs. More... | |
| double | getTimeout () const |
| Get the maximum timeout per planning attempt. More... | |
| const std::string & | getBenchmarkName () const |
| Get the reference name of the benchmark. More... | |
| const std::string & | getGroupName () const |
| Get the name of the planning group to run the benchmark with. More... | |
| const std::string & | getOutputDirectory () const |
| Get the target directory for the generated benchmark result data. More... | |
| const std::string & | getQueryRegex () const |
| Get the regex expression for matching the names of all queries to run. More... | |
| const std::string & | getStartStateRegex () const |
| Get the regex expression for matching the names of all start states to plan from. More... | |
| const std::string & | getGoalConstraintRegex () const |
| Get the regex expression for matching the names of all goal constraints to plan to. More... | |
| const std::string & | getPathConstraintRegex () const |
| Get the regex expression for matching the names of all path constraints to plan with. More... | |
| const std::string & | getTrajectoryConstraintRegex () const |
| Get the regex expression for matching the names of all trajectory constraints to plan with. More... | |
| const std::vector< std::string > & | getPredefinedPoses () const |
| Get the names of all predefined poses to consider for planning. More... | |
| const std::string & | getPredefinedPosesGroup () const |
| Get the name of the planning group for which the predefined poses are defined. More... | |
| void | getGoalOffsets (std::vector< double > &offsets) const |
| Get the constant position/orientation offset to be used for shifting all goal constraints. More... | |
| const std::map< std::string, std::vector< std::string > > & | getPlanningPipelineConfigurations () const |
| Get all planning pipeline names mapped to their parameter configuration. More... | |
| void | getPlanningPipelineNames (std::vector< std::string > &planning_pipeline_names) const |
| Get all planning pipeline names. More... | |
| const std::string & | getWorkspaceFrameID () const |
| const moveit_msgs::msg::WorkspaceParameters & | getWorkspaceParameters () const |
Protected Member Functions | |
| void | readBenchmarkOptions (const rclcpp::Node::SharedPtr &node) |
| void | readWarehouseOptions (const rclcpp::Node::SharedPtr &node) |
| void | readBenchmarkParameters (const rclcpp::Node::SharedPtr &node) |
| void | readPlannerConfigs (const rclcpp::Node::SharedPtr &node) |
| void | readWorkspaceParameters (const rclcpp::Node::SharedPtr &node) |
| void | readGoalOffset (const rclcpp::Node::SharedPtr &node) |
Protected Attributes | |
| std::string | hostname_ |
| warehouse parameters More... | |
| int | port_ |
| std::string | scene_name_ |
| int | runs_ |
| benchmark parameters More... | |
| double | timeout_ |
| std::string | benchmark_name_ |
| std::string | group_name_ |
| std::string | output_directory_ |
| std::string | query_regex_ |
| std::string | start_state_regex_ |
| std::string | goal_constraint_regex_ |
| std::string | path_constraint_regex_ |
| std::string | trajectory_constraint_regex_ |
| std::vector< std::string > | predefined_poses_ |
| std::string | predefined_poses_group_ |
| double | goal_offsets [6] |
| std::map< std::string, std::vector< std::string > > | planning_pipelines_ |
| planner configurations More... | |
| moveit_msgs::msg::WorkspaceParameters | workspace_ |
Detailed Description
Definition at line 47 of file BenchmarkOptions.h.
Constructor & Destructor Documentation
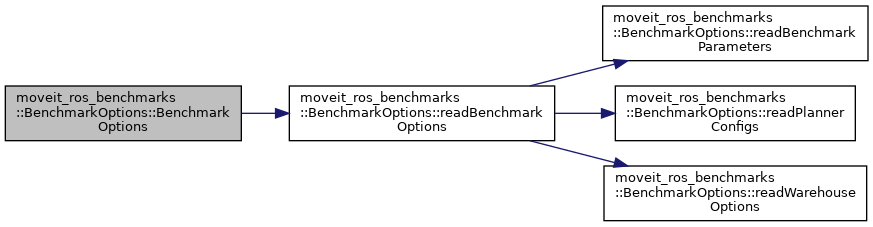
◆ BenchmarkOptions() [1/2]
| BenchmarkOptions::BenchmarkOptions | ( | ) |
Constructor.
Definition at line 43 of file BenchmarkOptions.cpp.
◆ BenchmarkOptions() [2/2]
| BenchmarkOptions::BenchmarkOptions | ( | const rclcpp::Node::SharedPtr & | node | ) |
Constructor accepting a custom namespace for parameter lookup.
Definition at line 47 of file BenchmarkOptions.cpp.
◆ ~BenchmarkOptions()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ getBenchmarkName()
| const std::string & BenchmarkOptions::getBenchmarkName | ( | ) | const |
Get the reference name of the benchmark.
Definition at line 98 of file BenchmarkOptions.cpp.
◆ getGoalConstraintRegex()
| const std::string & BenchmarkOptions::getGoalConstraintRegex | ( | ) | const |
Get the regex expression for matching the names of all goal constraints to plan to.
Definition at line 123 of file BenchmarkOptions.cpp.
◆ getGoalOffsets()
| void BenchmarkOptions::getGoalOffsets | ( | std::vector< double > & | offsets | ) | const |
Get the constant position/orientation offset to be used for shifting all goal constraints.
Definition at line 148 of file BenchmarkOptions.cpp.
◆ getGroupName()
| const std::string & BenchmarkOptions::getGroupName | ( | ) | const |
Get the name of the planning group to run the benchmark with.
Definition at line 103 of file BenchmarkOptions.cpp.

◆ getHostName()
| const std::string & BenchmarkOptions::getHostName | ( | ) | const |
Set the ROS namespace the node handle should use for parameter lookup.
Get the name of the warehouse database host server
Definition at line 73 of file BenchmarkOptions.cpp.

◆ getNumRuns()
| int BenchmarkOptions::getNumRuns | ( | ) | const |
Get the specified number of benchmark query runs.
Definition at line 88 of file BenchmarkOptions.cpp.
◆ getOutputDirectory()
| const std::string & BenchmarkOptions::getOutputDirectory | ( | ) | const |
Get the target directory for the generated benchmark result data.
Definition at line 108 of file BenchmarkOptions.cpp.
◆ getPathConstraintRegex()
| const std::string & BenchmarkOptions::getPathConstraintRegex | ( | ) | const |
Get the regex expression for matching the names of all path constraints to plan with.
Definition at line 128 of file BenchmarkOptions.cpp.
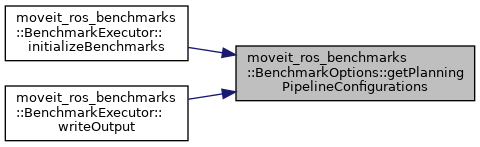
◆ getPlanningPipelineConfigurations()
| const std::map< std::string, std::vector< std::string > > & BenchmarkOptions::getPlanningPipelineConfigurations | ( | ) | const |
Get all planning pipeline names mapped to their parameter configuration.
Definition at line 154 of file BenchmarkOptions.cpp.
◆ getPlanningPipelineNames()
| void BenchmarkOptions::getPlanningPipelineNames | ( | std::vector< std::string > & | planning_pipeline_names | ) | const |
Get all planning pipeline names.
Definition at line 159 of file BenchmarkOptions.cpp.

◆ getPort()
| int BenchmarkOptions::getPort | ( | ) | const |
Get the port of the warehouse database host server.
Definition at line 78 of file BenchmarkOptions.cpp.

◆ getPredefinedPoses()
| const std::vector< std::string > & BenchmarkOptions::getPredefinedPoses | ( | ) | const |
Get the names of all predefined poses to consider for planning.
Definition at line 138 of file BenchmarkOptions.cpp.
◆ getPredefinedPosesGroup()
| const std::string & BenchmarkOptions::getPredefinedPosesGroup | ( | ) | const |
Get the name of the planning group for which the predefined poses are defined.
Definition at line 143 of file BenchmarkOptions.cpp.
◆ getQueryRegex()
| const std::string & BenchmarkOptions::getQueryRegex | ( | ) | const |
Get the regex expression for matching the names of all queries to run.
Definition at line 113 of file BenchmarkOptions.cpp.
◆ getSceneName()
| const std::string & BenchmarkOptions::getSceneName | ( | ) | const |
Get the reference name of the planning scene stored inside the warehouse database.
Definition at line 83 of file BenchmarkOptions.cpp.
◆ getStartStateRegex()
| const std::string & BenchmarkOptions::getStartStateRegex | ( | ) | const |
Get the regex expression for matching the names of all start states to plan from.
Definition at line 118 of file BenchmarkOptions.cpp.
◆ getTimeout()
| double BenchmarkOptions::getTimeout | ( | ) | const |
Get the maximum timeout per planning attempt.
Definition at line 93 of file BenchmarkOptions.cpp.
◆ getTrajectoryConstraintRegex()
| const std::string & BenchmarkOptions::getTrajectoryConstraintRegex | ( | ) | const |
Get the regex expression for matching the names of all trajectory constraints to plan with.
Definition at line 133 of file BenchmarkOptions.cpp.
◆ getWorkspaceFrameID()
| const std::string & BenchmarkOptions::getWorkspaceFrameID | ( | ) | const |
Definition at line 166 of file BenchmarkOptions.cpp.
◆ getWorkspaceParameters()
| const moveit_msgs::msg::WorkspaceParameters & BenchmarkOptions::getWorkspaceParameters | ( | ) | const |
Definition at line 171 of file BenchmarkOptions.cpp.
◆ readBenchmarkOptions()
|
protected |
Definition at line 59 of file BenchmarkOptions.cpp.
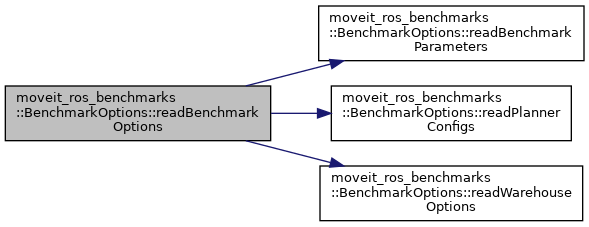

◆ readBenchmarkParameters()
|
protected |

◆ readGoalOffset()
|
protected |
◆ readPlannerConfigs()
|
protected |

◆ readWarehouseOptions()
|
protected |

◆ readWorkspaceParameters()
|
protected |
Definition at line 240 of file BenchmarkOptions.cpp.
Member Data Documentation
◆ benchmark_name_
|
protected |
Definition at line 121 of file BenchmarkOptions.h.
◆ goal_constraint_regex_
|
protected |
Definition at line 126 of file BenchmarkOptions.h.
◆ goal_offsets
|
protected |
Definition at line 131 of file BenchmarkOptions.h.
◆ group_name_
|
protected |
Definition at line 122 of file BenchmarkOptions.h.
◆ hostname_
|
protected |
warehouse parameters
Definition at line 114 of file BenchmarkOptions.h.
◆ output_directory_
|
protected |
Definition at line 123 of file BenchmarkOptions.h.
◆ path_constraint_regex_
|
protected |
Definition at line 127 of file BenchmarkOptions.h.
◆ planning_pipelines_
|
protected |
planner configurations
Definition at line 134 of file BenchmarkOptions.h.
◆ port_
|
protected |
Definition at line 115 of file BenchmarkOptions.h.
◆ predefined_poses_
|
protected |
Definition at line 129 of file BenchmarkOptions.h.
◆ predefined_poses_group_
|
protected |
Definition at line 130 of file BenchmarkOptions.h.
◆ query_regex_
|
protected |
Definition at line 124 of file BenchmarkOptions.h.
◆ runs_
|
protected |
benchmark parameters
Definition at line 119 of file BenchmarkOptions.h.
◆ scene_name_
|
protected |
Definition at line 116 of file BenchmarkOptions.h.
◆ start_state_regex_
|
protected |
Definition at line 125 of file BenchmarkOptions.h.
◆ timeout_
|
protected |
Definition at line 120 of file BenchmarkOptions.h.
◆ trajectory_constraint_regex_
|
protected |
Definition at line 128 of file BenchmarkOptions.h.
◆ workspace_
|
protected |
Definition at line 136 of file BenchmarkOptions.h.
The documentation for this class was generated from the following files:
- moveit_ros/benchmarks/include/moveit/benchmarks/BenchmarkOptions.h
- moveit_ros/benchmarks/src/BenchmarkOptions.cpp