#include <ControllerHandle.h>
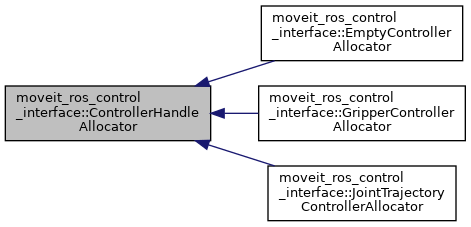
Inheritance diagram for moveit_ros_control_interface::ControllerHandleAllocator:
Public Member Functions | |
| virtual moveit_controller_manager::MoveItControllerHandlePtr | alloc (const rclcpp::Node::SharedPtr &node, const std::string &name, const std::vector< std::string > &resources)=0 |
| virtual | ~ControllerHandleAllocator () |
Detailed Description
Base class for MoveItControllerHandle allocators
Definition at line 49 of file ControllerHandle.h.
Constructor & Destructor Documentation
◆ ~ControllerHandleAllocator()
|
inlinevirtual |
Definition at line 54 of file ControllerHandle.h.
Member Function Documentation
◆ alloc()
|
pure virtual |
The documentation for this class was generated from the following file:
- moveit_plugins/moveit_ros_control_interface/include/moveit_ros_control_interface/ControllerHandle.h