#include <servo_launch_test_common.hpp>
◆ ServoFixture()
| moveit_servo::ServoFixture::ServoFixture |
( |
| ) |
|
|
inline |
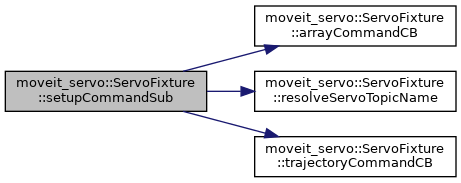
◆ arrayCommandCB()
| void moveit_servo::ServoFixture::arrayCommandCB |
( |
const std_msgs::msg::Float64MultiArray::ConstSharedPtr & |
msg | ) |
|
|
inline |
◆ collisionScaleCB()
| void moveit_servo::ServoFixture::collisionScaleCB |
( |
const std_msgs::msg::Float64::ConstSharedPtr & |
msg | ) |
|
|
inline |
◆ getLatestArrayCommand()
| std_msgs::msg::Float64MultiArray moveit_servo::ServoFixture::getLatestArrayCommand |
( |
| ) |
|
|
inline |
◆ getLatestCollisionScale()
| double moveit_servo::ServoFixture::getLatestCollisionScale |
( |
| ) |
|
|
inline |
◆ getLatestJointState()
| sensor_msgs::msg::JointState moveit_servo::ServoFixture::getLatestJointState |
( |
| ) |
|
|
inline |
◆ getLatestStatus()
| StatusCode moveit_servo::ServoFixture::getLatestStatus |
( |
| ) |
|
|
inline |
◆ getLatestTrajCommand()
| trajectory_msgs::msg::JointTrajectory moveit_servo::ServoFixture::getLatestTrajCommand |
( |
| ) |
|
|
inline |
◆ getNumCollisionScale()
| size_t moveit_servo::ServoFixture::getNumCollisionScale |
( |
| ) |
|
|
inline |
◆ getNumCommands()
| size_t moveit_servo::ServoFixture::getNumCommands |
( |
| ) |
|
|
inline |
◆ getNumJointState()
| size_t moveit_servo::ServoFixture::getNumJointState |
( |
| ) |
|
|
inline |
◆ getNumStatus()
| size_t moveit_servo::ServoFixture::getNumStatus |
( |
| ) |
|
|
inline |
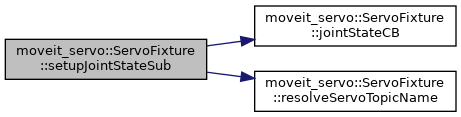
◆ jointStateCB()
| void moveit_servo::ServoFixture::jointStateCB |
( |
const sensor_msgs::msg::JointState::ConstSharedPtr & |
msg | ) |
|
|
inline |
◆ resetNumCollisionScale()
| void moveit_servo::ServoFixture::resetNumCollisionScale |
( |
| ) |
|
|
inline |
◆ resetNumCommands()
| void moveit_servo::ServoFixture::resetNumCommands |
( |
| ) |
|
|
inline |
◆ resetNumJointState()
| void moveit_servo::ServoFixture::resetNumJointState |
( |
| ) |
|
|
inline |
◆ resetNumStatus()
| void moveit_servo::ServoFixture::resetNumStatus |
( |
| ) |
|
|
inline |
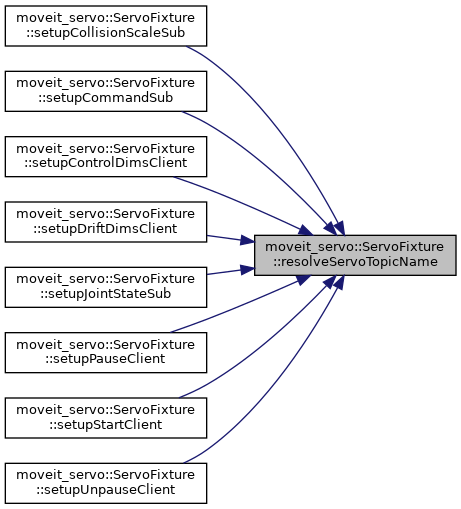
◆ resolveServoTopicName()
| std::string moveit_servo::ServoFixture::resolveServoTopicName |
( |
std::string |
topic_name | ) |
|
|
inline |
◆ sawTrackedStatus()
| bool moveit_servo::ServoFixture::sawTrackedStatus |
( |
| ) |
|
|
inline |
◆ SetUp()
| void moveit_servo::ServoFixture::SetUp |
( |
| ) |
|
|
inlineoverride |
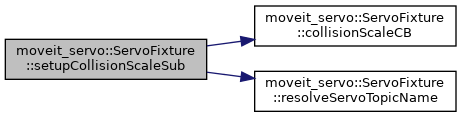
◆ setupCollisionScaleSub()
| bool moveit_servo::ServoFixture::setupCollisionScaleSub |
( |
| ) |
|
|
inline |
◆ setupCommandSub()
| bool moveit_servo::ServoFixture::setupCommandSub |
( |
const std::string & |
command_type | ) |
|
|
inline |
◆ setupControlDimsClient()
| bool moveit_servo::ServoFixture::setupControlDimsClient |
( |
| ) |
|
|
inline |
◆ setupDriftDimsClient()
| bool moveit_servo::ServoFixture::setupDriftDimsClient |
( |
| ) |
|
|
inline |
◆ setupJointStateSub()
| bool moveit_servo::ServoFixture::setupJointStateSub |
( |
| ) |
|
|
inline |
◆ setupPauseClient()
| bool moveit_servo::ServoFixture::setupPauseClient |
( |
| ) |
|
|
inline |
◆ setupStartClient()
| bool moveit_servo::ServoFixture::setupStartClient |
( |
| ) |
|
|
inline |
◆ setupUnpauseClient()
| bool moveit_servo::ServoFixture::setupUnpauseClient |
( |
| ) |
|
|
inline |
◆ start()
| bool moveit_servo::ServoFixture::start |
( |
| ) |
|
|
inline |
◆ statusCB()
| void moveit_servo::ServoFixture::statusCB |
( |
const std_msgs::msg::Int8::ConstSharedPtr & |
msg | ) |
|
|
inline |
◆ stop()
| bool moveit_servo::ServoFixture::stop |
( |
| ) |
|
|
inline |
◆ TearDown()
| void moveit_servo::ServoFixture::TearDown |
( |
| ) |
|
|
inlineoverride |
◆ trajectoryCommandCB()
| void moveit_servo::ServoFixture::trajectoryCommandCB |
( |
const trajectory_msgs::msg::JointTrajectory::ConstSharedPtr & |
msg | ) |
|
|
inline |
◆ watchForStatus()
| void moveit_servo::ServoFixture::watchForStatus |
( |
StatusCode |
code_to_watch_for | ) |
|
|
inline |
◆ client_change_control_dims_
| rclcpp::Client<moveit_msgs::srv::ChangeControlDimensions>::SharedPtr moveit_servo::ServoFixture::client_change_control_dims_ |
|
protected |
◆ client_change_drift_dims_
| rclcpp::Client<moveit_msgs::srv::ChangeDriftDimensions>::SharedPtr moveit_servo::ServoFixture::client_change_drift_dims_ |
|
protected |
◆ client_servo_pause_
| rclcpp::Client<std_srvs::srv::Trigger>::SharedPtr moveit_servo::ServoFixture::client_servo_pause_ |
|
protected |
◆ client_servo_start_
| rclcpp::Client<std_srvs::srv::Trigger>::SharedPtr moveit_servo::ServoFixture::client_servo_start_ |
|
protected |
◆ client_servo_stop_
| rclcpp::Client<std_srvs::srv::Trigger>::SharedPtr moveit_servo::ServoFixture::client_servo_stop_ |
|
protected |
◆ client_servo_unpause_
| rclcpp::Client<std_srvs::srv::Trigger>::SharedPtr moveit_servo::ServoFixture::client_servo_unpause_ |
|
protected |
◆ executor_
| rclcpp::Executor::SharedPtr moveit_servo::ServoFixture::executor_ |
|
protected |
◆ executor_thread_
| std::thread moveit_servo::ServoFixture::executor_thread_ |
|
protected |
◆ latest_array_cmd_
| std_msgs::msg::Float64MultiArray::ConstSharedPtr moveit_servo::ServoFixture::latest_array_cmd_ |
|
protected |
◆ latest_collision_scale_
| double moveit_servo::ServoFixture::latest_collision_scale_ |
|
protected |
◆ latest_joint_state_
| sensor_msgs::msg::JointState::ConstSharedPtr moveit_servo::ServoFixture::latest_joint_state_ |
|
protected |
◆ latest_state_mutex_
| std::mutex moveit_servo::ServoFixture::latest_state_mutex_ |
|
mutableprotected |
◆ latest_status_
◆ latest_traj_cmd_
| trajectory_msgs::msg::JointTrajectory::ConstSharedPtr moveit_servo::ServoFixture::latest_traj_cmd_ |
|
protected |
◆ node_
| rclcpp::Node::SharedPtr moveit_servo::ServoFixture::node_ |
|
protected |
◆ num_collision_scale_
| size_t moveit_servo::ServoFixture::num_collision_scale_ |
|
protected |
◆ num_commands_
| size_t moveit_servo::ServoFixture::num_commands_ |
|
protected |
◆ num_joint_state_
| size_t moveit_servo::ServoFixture::num_joint_state_ |
|
protected |
◆ num_status_
| size_t moveit_servo::ServoFixture::num_status_ |
|
protected |
◆ pub_joint_cmd_
| rclcpp::Publisher<control_msgs::msg::JointJog>::SharedPtr moveit_servo::ServoFixture::pub_joint_cmd_ |
|
protected |
◆ pub_twist_cmd_
| rclcpp::Publisher<geometry_msgs::msg::TwistStamped>::SharedPtr moveit_servo::ServoFixture::pub_twist_cmd_ |
|
protected |
◆ servo_parameters_
◆ status_seen_
| bool moveit_servo::ServoFixture::status_seen_ |
|
protected |
◆ status_tracking_code_
◆ sub_array_cmd_output_
| rclcpp::Subscription<std_msgs::msg::Float64MultiArray>::SharedPtr moveit_servo::ServoFixture::sub_array_cmd_output_ |
|
protected |
◆ sub_collision_scale_
| rclcpp::Subscription<std_msgs::msg::Float64>::SharedPtr moveit_servo::ServoFixture::sub_collision_scale_ |
|
protected |
◆ sub_joint_state_
| rclcpp::Subscription<sensor_msgs::msg::JointState>::SharedPtr moveit_servo::ServoFixture::sub_joint_state_ |
|
protected |
◆ sub_servo_status_
| rclcpp::Subscription<std_msgs::msg::Int8>::SharedPtr moveit_servo::ServoFixture::sub_servo_status_ |
|
protected |
◆ sub_trajectory_cmd_output_
| rclcpp::Subscription<trajectory_msgs::msg::JointTrajectory>::SharedPtr moveit_servo::ServoFixture::sub_trajectory_cmd_output_ |
|
protected |
◆ test_parameters_
| std::shared_ptr<const struct TestParameters> moveit_servo::ServoFixture::test_parameters_ |
|
protected |
The documentation for this class was generated from the following file: