Box shaped position constraints. More...
#include <ompl_constraints.h>

Public Member Functions | |
| BoxConstraint (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const unsigned int num_dofs) | |
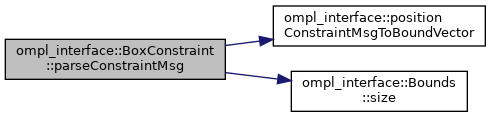
| void | parseConstraintMsg (const moveit_msgs::msg::Constraints &constraints) override |
| Parse bounds on position parameters from MoveIt's constraint message. More... | |
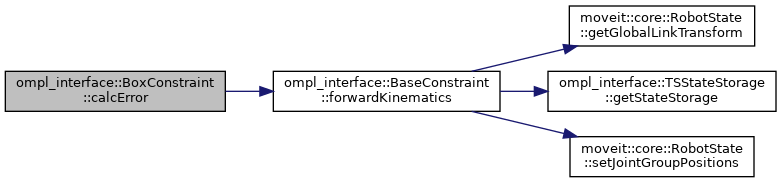
| Eigen::VectorXd | calcError (const Eigen::Ref< const Eigen::VectorXd > &x) const override |
| For inequality constraints: calculate the value of the parameter that is being constrained by the bounds. More... | |
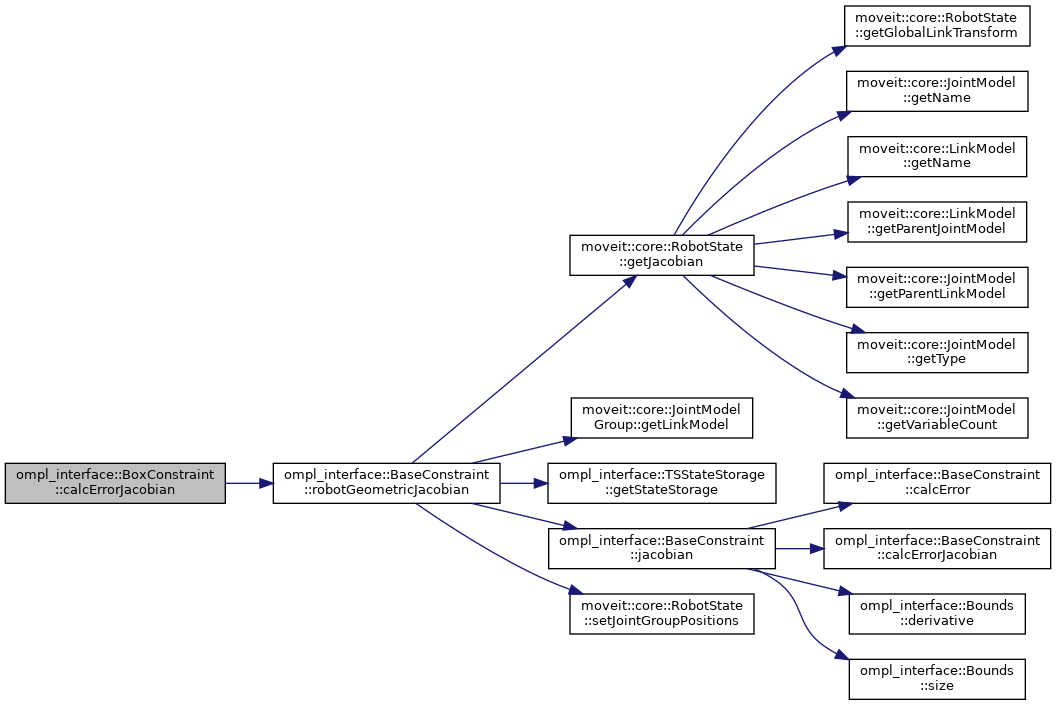
| Eigen::MatrixXd | calcErrorJacobian (const Eigen::Ref< const Eigen::VectorXd > &x) const override |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
| |
 Public Member Functions inherited from ompl_interface::BaseConstraint Public Member Functions inherited from ompl_interface::BaseConstraint | |
| BaseConstraint (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const unsigned int num_dofs, const unsigned int num_cons=3) | |
Construct a BaseConstraint using 3 num_cons by default because all constraints currently implemented have 3 constraint equations. More... | |
| void | init (const moveit_msgs::msg::Constraints &constraints) |
| Initialize constraint based on message content. More... | |
| void | function (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::VectorXd > out) const override |
| void | jacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::MatrixXd > out) const override |
| Jacobian of the constraint function. More... | |
| Eigen::Isometry3d | forwardKinematics (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Wrapper for forward kinematics calculated by MoveIt's Robot State. More... | |
| Eigen::MatrixXd | robotGeometricJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Calculate the robot's geometric Jacobian using MoveIt's Robot State. More... | |
| const std::string & | getLinkName () |
| const Eigen::Vector3d | getTargetPosition () |
| const Eigen::Quaterniond | getTargetOrientation () |
Additional Inherited Members | |
| Protected Attributes inherited from ompl_interface::BaseConstraint | |
| TSStateStorage | state_storage_ |
| Thread-safe storage of the robot state. More... | |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| std::string | link_name_ |
| Robot link the constraints are applied to. More... | |
| Bounds | bounds_ |
| Upper and lower bounds on constrained variables. More... | |
| Eigen::Vector3d | target_position_ |
| target for equality constraints, nominal value for inequality constraints. More... | |
| Eigen::Quaterniond | target_orientation_ |
| target for equality constraints, nominal value for inequality constraints. More... | |
Detailed Description
Box shaped position constraints.
Reads bounds on x, y and z position from a position constraint at constraint_region.primitives[0].dimensions. Where the primitive has to be of type shape_msgs/SolidPrimitive.BOX.
These bounds are applied around the nominal position and orientation of the box.
Definition at line 257 of file ompl_constraints.h.
Constructor & Destructor Documentation
◆ BoxConstraint()
| ompl_interface::BoxConstraint::BoxConstraint | ( | const moveit::core::RobotModelConstPtr & | robot_model, |
| const std::string & | group, | ||
| const unsigned int | num_dofs | ||
| ) |
Definition at line 191 of file ompl_constraints.cpp.
Member Function Documentation
◆ calcError()
|
overridevirtual |
For inequality constraints: calculate the value of the parameter that is being constrained by the bounds.
In this Position constraints case, it calculates the x, y and z position of the end-effector. This error is then converted in generic equality constraints in the implementation of ompl_interface::BaseConstraint::function.
This method can be bypassed if you want to override `ompl_interface::BaseConstraint::function directly and ignore the bounds calculation.
Reimplemented from ompl_interface::BaseConstraint.
Definition at line 214 of file ompl_constraints.cpp.
◆ calcErrorJacobian()
|
overridevirtual |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
- This error jacobian, as the name suggests, is only the jacobian of the position / orientation / ... error. It does not take into account the derivative of the penalty functions defined in the Bounds class. This correction is added in the implementation of of BaseConstraint::jacobian.
This method can be bypassed if you want to override `ompl_interface::BaseConstraint::jacobian directly and ignore the bounds calculation.
TODO(jeroendm), Maybe also use an output argument as in ompl::base::Constraint::jacobian(x, out) for better performance?
Reimplemented from ompl_interface::BaseConstraint.
Definition at line 219 of file ompl_constraints.cpp.
◆ parseConstraintMsg()
|
overridevirtual |
Parse bounds on position parameters from MoveIt's constraint message.
This can be non-trivial given the often complex structure of these messages.
Implements ompl_interface::BaseConstraint.
Definition at line 197 of file ompl_constraints.cpp.
The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/detail/ompl_constraints.h
- moveit_planners/ompl/ompl_interface/src/detail/ompl_constraints.cpp