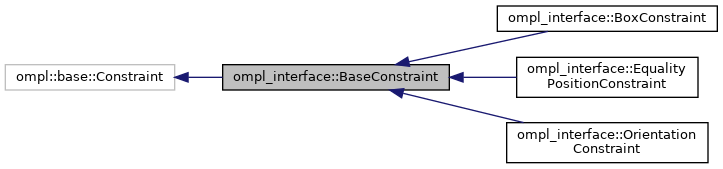
Abstract base class for different types of constraints, implementations of ompl::base::Constraint. More...
#include <ompl_constraints.h>

Public Member Functions | |
| BaseConstraint (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const unsigned int num_dofs, const unsigned int num_cons=3) | |
Construct a BaseConstraint using 3 num_cons by default because all constraints currently implemented have 3 constraint equations. More... | |
| void | init (const moveit_msgs::msg::Constraints &constraints) |
| Initialize constraint based on message content. More... | |
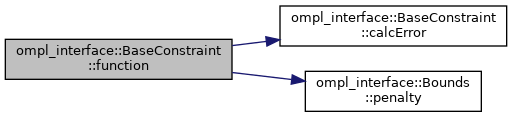
| void | function (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::VectorXd > out) const override |
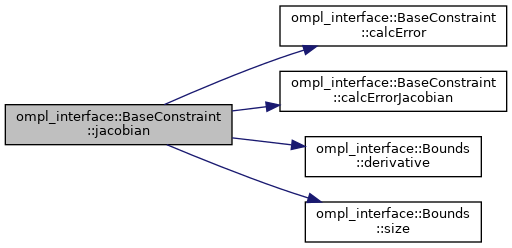
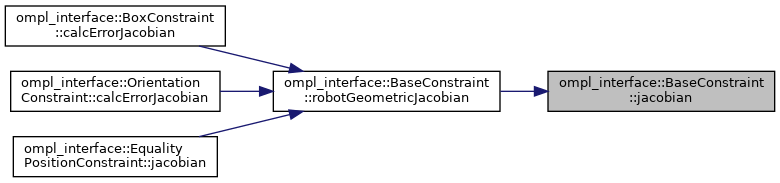
| void | jacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values, Eigen::Ref< Eigen::MatrixXd > out) const override |
| Jacobian of the constraint function. More... | |
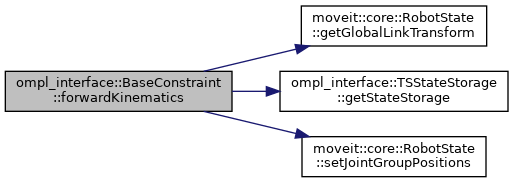
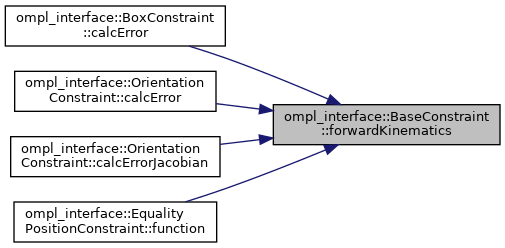
| Eigen::Isometry3d | forwardKinematics (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Wrapper for forward kinematics calculated by MoveIt's Robot State. More... | |
| Eigen::MatrixXd | robotGeometricJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const |
| Calculate the robot's geometric Jacobian using MoveIt's Robot State. More... | |
| virtual void | parseConstraintMsg (const moveit_msgs::msg::Constraints &constraints)=0 |
| Parse bounds on position and orientation parameters from MoveIt's constraint message. More... | |
| virtual Eigen::VectorXd | calcError (const Eigen::Ref< const Eigen::VectorXd > &) const |
| For inequality constraints: calculate the value of the parameter that is being constrained by the bounds. More... | |
| virtual Eigen::MatrixXd | calcErrorJacobian (const Eigen::Ref< const Eigen::VectorXd > &) const |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
| |
| const std::string & | getLinkName () |
| const Eigen::Vector3d | getTargetPosition () |
| const Eigen::Quaterniond | getTargetOrientation () |
Protected Attributes | |
| TSStateStorage | state_storage_ |
| Thread-safe storage of the robot state. More... | |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| std::string | link_name_ |
| Robot link the constraints are applied to. More... | |
| Bounds | bounds_ |
| Upper and lower bounds on constrained variables. More... | |
| Eigen::Vector3d | target_position_ |
| target for equality constraints, nominal value for inequality constraints. More... | |
| Eigen::Quaterniond | target_orientation_ |
| target for equality constraints, nominal value for inequality constraints. More... | |
Detailed Description
Abstract base class for different types of constraints, implementations of ompl::base::Constraint.
To create a constrained state space in OMPL, we need a model of the constraints, that can be written in the form of equality constraints F(joint_values) = 0. This class uses Bounds defined above, to convert:
lower_bound < scalar value < upper bound
into an equation of the form f(x) = 0.
The 'scalar value' can be the difference between the position or orientation of a link and a target position or orientation, or any other error metric that can be calculated using the moveit::core::RobotModel and moveit::core::JointModelGroup.
Definition at line 121 of file ompl_constraints.h.
Constructor & Destructor Documentation
◆ BaseConstraint()
| ompl_interface::BaseConstraint::BaseConstraint | ( | const moveit::core::RobotModelConstPtr & | robot_model, |
| const std::string & | group, | ||
| const unsigned int | num_dofs, | ||
| const unsigned int | num_cons = 3 |
||
| ) |
Construct a BaseConstraint using 3 num_cons by default because all constraints currently implemented have 3 constraint equations.
Definition at line 123 of file ompl_constraints.cpp.
Member Function Documentation
◆ calcError()
|
virtual |
For inequality constraints: calculate the value of the parameter that is being constrained by the bounds.
In this Position constraints case, it calculates the x, y and z position of the end-effector. This error is then converted in generic equality constraints in the implementation of ompl_interface::BaseConstraint::function.
This method can be bypassed if you want to override `ompl_interface::BaseConstraint::function directly and ignore the bounds calculation.
Reimplemented in ompl_interface::OrientationConstraint, and ompl_interface::BoxConstraint.
Definition at line 174 of file ompl_constraints.cpp.

◆ calcErrorJacobian()
|
virtual |
For inequality constraints: calculate the Jacobian for the current parameters that are being constrained.
- This error jacobian, as the name suggests, is only the jacobian of the position / orientation / ... error. It does not take into account the derivative of the penalty functions defined in the Bounds class. This correction is added in the implementation of of BaseConstraint::jacobian.
This method can be bypassed if you want to override `ompl_interface::BaseConstraint::jacobian directly and ignore the bounds calculation.
TODO(jeroendm), Maybe also use an output argument as in ompl::base::Constraint::jacobian(x, out) for better performance?
Reimplemented in ompl_interface::OrientationConstraint, and ompl_interface::BoxConstraint.
Definition at line 181 of file ompl_constraints.cpp.

◆ forwardKinematics()
| Eigen::Isometry3d ompl_interface::BaseConstraint::forwardKinematics | ( | const Eigen::Ref< const Eigen::VectorXd > & | joint_values | ) | const |
Wrapper for forward kinematics calculated by MoveIt's Robot State.
TODO(jeroendm) Are these actually const, as the robot state is modified? How come it works? Also, output arguments could be significantly more performant, but MoveIt's robot state does not support passing Eigen::Ref objects at the moment.
Definition at line 156 of file ompl_constraints.cpp.
◆ function()
|
override |
OMPL's main constraint evaluation function.
OMPL requires you to override at least "function" which represents the constraint F(q) = 0
Definition at line 137 of file ompl_constraints.cpp.
◆ getLinkName()
|
inline |
Definition at line 198 of file ompl_constraints.h.
◆ getTargetOrientation()
|
inline |
Definition at line 208 of file ompl_constraints.h.
◆ getTargetPosition()
|
inline |
Definition at line 203 of file ompl_constraints.h.
◆ init()
| void ompl_interface::BaseConstraint::init | ( | const moveit_msgs::msg::Constraints & | constraints | ) |
Initialize constraint based on message content.
This is necessary because we cannot call the pure virtual parseConstraintsMsg method from the constructor of this class.
Definition at line 132 of file ompl_constraints.cpp.

◆ jacobian()
|
override |
Jacobian of the constraint function.
Optionally you can also provide dF(q)/dq, the Jacobian of the constraint.
Definition at line 144 of file ompl_constraints.cpp.
◆ parseConstraintMsg()
|
pure virtual |
Parse bounds on position and orientation parameters from MoveIt's constraint message.
This can be non-trivial given the often complex structure of these messages.
Implemented in ompl_interface::OrientationConstraint, ompl_interface::EqualityPositionConstraint, and ompl_interface::BoxConstraint.

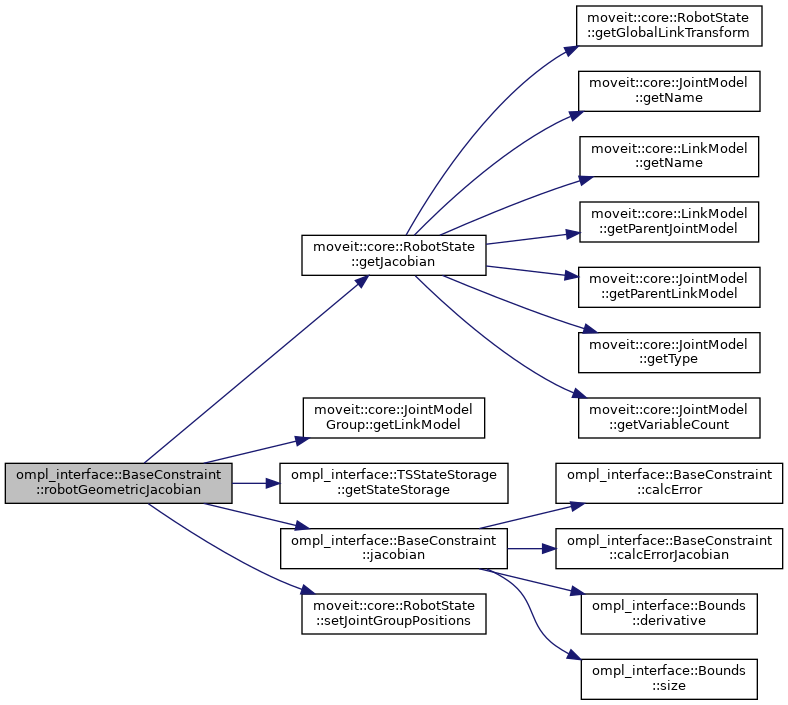
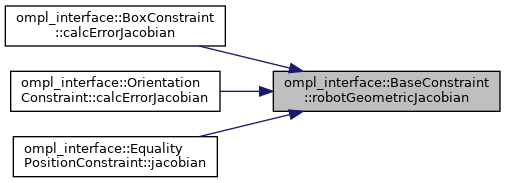
◆ robotGeometricJacobian()
| Eigen::MatrixXd ompl_interface::BaseConstraint::robotGeometricJacobian | ( | const Eigen::Ref< const Eigen::VectorXd > & | joint_values | ) | const |
Calculate the robot's geometric Jacobian using MoveIt's Robot State.
Ideally I would pass the output argument from OMPL's jacobian function directly, but I cannot pass an object of type , Eigen::Ref<Eigen::MatrixXd> to MoveIt's Jacobian method.
Definition at line 163 of file ompl_constraints.cpp.
Member Data Documentation
◆ bounds_
|
protected |
Upper and lower bounds on constrained variables.
Definition at line 231 of file ompl_constraints.h.
◆ joint_model_group_
|
protected |
Definition at line 220 of file ompl_constraints.h.
◆ link_name_
|
protected |
Robot link the constraints are applied to.
Definition at line 228 of file ompl_constraints.h.
◆ state_storage_
|
protected |
Thread-safe storage of the robot state.
The robot state is modified for kinematic calculations. As an instance of this class is possibly used in multiple threads due to OMPL's LazyGoalSampler, we need a separate robot state in every thread.
Definition at line 219 of file ompl_constraints.h.
◆ target_orientation_
|
protected |
target for equality constraints, nominal value for inequality constraints.
Definition at line 237 of file ompl_constraints.h.
◆ target_position_
|
protected |
target for equality constraints, nominal value for inequality constraints.
Definition at line 234 of file ompl_constraints.h.
The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/detail/ompl_constraints.h
- moveit_planners/ompl/ompl_interface/src/detail/ompl_constraints.cpp