A PTP Trajectory Generator of Asymmetric Trapezoidal Velocity Profile. Differences to VelocityProfile_Trap: More...
#include <velocity_profile_atrap.h>
Public Member Functions | |
| VelocityProfileATrap (double max_vel=0, double max_acc=0, double max_dec=0) | |
| Constructor. More... | |
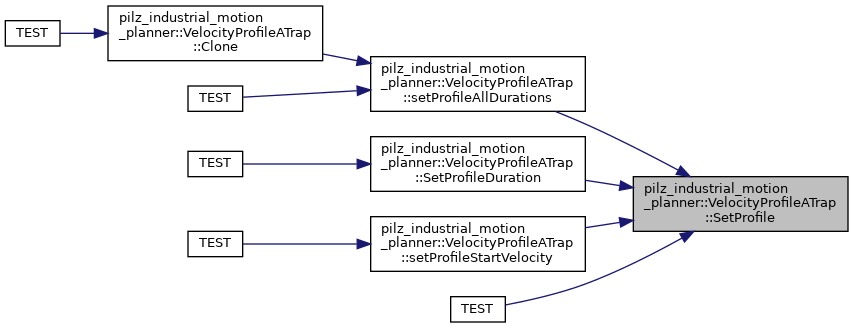
| void | SetProfile (double pos1, double pos2) override |
| compute the fastest profile Algorithm: More... | |
| void | SetProfileDuration (double pos1, double pos2, double duration) override |
| Profile scaled by the total duration. More... | |
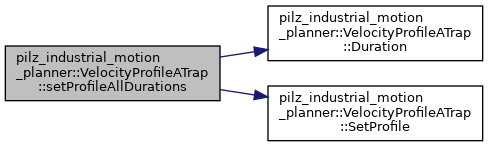
| bool | setProfileAllDurations (double pos1, double pos2, double duration1, double duration2, double duration3) |
| Profile with given acceleration/constant/deceleration durations. Each duration must obey the maximal velocity/acceleration/deceleration constraints. Otherwise the operation will be ignored. Algorithm: More... | |
| bool | setProfileStartVelocity (double pos1, double pos2, double vel1) |
| Profile with start velocity Note: This function is not general and is currently only used for live control (vel1*(pos2-pos1)>0). More... | |
| double | firstPhaseDuration () const |
| get the time of first phase More... | |
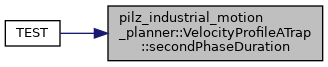
| double | secondPhaseDuration () const |
| get the time of second phase More... | |
| double | thirdPhaseDuration () const |
| get the time of third phase More... | |
| bool | operator== (const VelocityProfileATrap &other) const |
| Compares two Asymmetric Trapezoidal Velocity Profiles. More... | |
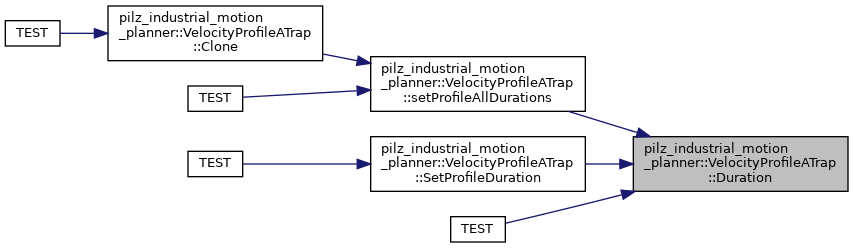
| double | Duration () const override |
| Duration. More... | |
| double | Pos (double time) const override |
| Get position at given time. More... | |
| double | Vel (double time) const override |
| Get velocity at given time. More... | |
| double | Acc (double time) const override |
| Get given acceleration/deceleration at given time. More... | |
| void | Write (std::ostream &os) const override |
| Write basic information. More... | |
| KDL::VelocityProfile * | Clone () const override |
| returns copy of current VelocityProfile object More... | |
| ~VelocityProfileATrap () override | |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const VelocityProfileATrap &p) |
Detailed Description
A PTP Trajectory Generator of Asymmetric Trapezoidal Velocity Profile. Differences to VelocityProfile_Trap:
- Maximal acceleration and deceleration can be different, resulting an asymmetric trapezoid shaped velocity profile.
- Function to generate full synchronized PTP trajectory is provided.
- Function to generate trapezoid shaped velocity profile with start velocity.
Definition at line 51 of file velocity_profile_atrap.h.
Constructor & Destructor Documentation
◆ VelocityProfileATrap()
| pilz_industrial_motion_planner::VelocityProfileATrap::VelocityProfileATrap | ( | double | max_vel = 0, |
| double | max_acc = 0, |
||
| double | max_dec = 0 |
||
| ) |
Constructor.
- Parameters
-
max_vel maximal velocity (absolute value, always positive) max_acc maximal acceleration (absolute value, always positive) max_dec maximal deceleration (absolute value, always positive)
Definition at line 39 of file velocity_profile_atrap.cpp.

◆ ~VelocityProfileATrap()
|
override |
Definition at line 431 of file velocity_profile_atrap.cpp.
Member Function Documentation
◆ Acc()
|
override |
Get given acceleration/deceleration at given time.
- Parameters
-
time
- Returns
Definition at line 360 of file velocity_profile_atrap.cpp.

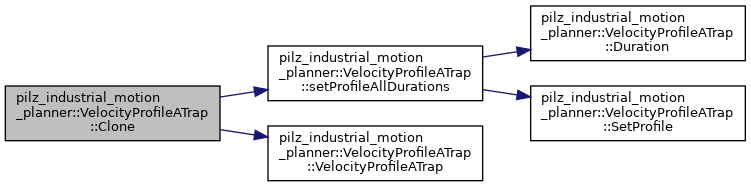
◆ Clone()
|
override |
returns copy of current VelocityProfile object
- Returns
Definition at line 384 of file velocity_profile_atrap.cpp.
◆ Duration()
|
override |
Duration.
- Returns
- total duration of the trajectory
Definition at line 307 of file velocity_profile_atrap.cpp.
◆ firstPhaseDuration()
|
inline |
get the time of first phase
- Returns
Definition at line 120 of file velocity_profile_atrap.h.

◆ operator==()
| bool pilz_industrial_motion_planner::VelocityProfileATrap::operator== | ( | const VelocityProfileATrap & | other | ) | const |
Compares two Asymmetric Trapezoidal Velocity Profiles.
- Returns
- True if equal, false otherwise.
Definition at line 422 of file velocity_profile_atrap.cpp.
◆ Pos()
|
override |
Get position at given time.
- Parameters
-
time
- Returns
Definition at line 312 of file velocity_profile_atrap.cpp.

◆ secondPhaseDuration()
|
inline |
get the time of second phase
- Returns
Definition at line 128 of file velocity_profile_atrap.h.
◆ SetProfile()
|
override |
compute the fastest profile Algorithm:
- compute the minimal distance which is needed to reach maximal velocity
- if maximal velocity can be reached
- compute the coefficients of the trajectory
- if maximal velocity can not be reached
- compute the new velocity can be reached
- compute the coefficients based on this new velocity
- Parameters
-
pos1 start position pos2 goal position
Definition at line 61 of file velocity_profile_atrap.cpp.
◆ setProfileAllDurations()
| bool pilz_industrial_motion_planner::VelocityProfileATrap::setProfileAllDurations | ( | double | pos1, |
| double | pos2, | ||
| double | duration1, | ||
| double | duration2, | ||
| double | duration3 | ||
| ) |
Profile with given acceleration/constant/deceleration durations. Each duration must obey the maximal velocity/acceleration/deceleration constraints. Otherwise the operation will be ignored. Algorithm:
- compute the maximal velocity of given durations
- compute the acceleration and deceleration of given duraitons
- if limits are fulfilled
- compute the coefficients
- Parameters
-
pos1 start position pos2 goal position acc_duration time of acceleration phase const_duration time of constant phase dec_duration time of deceleration phase
- Returns
- true if the combination of three durations is valid
- compute the coefficients
Definition at line 152 of file velocity_profile_atrap.cpp.

◆ SetProfileDuration()
|
override |
Profile scaled by the total duration.
- Parameters
-
pos1 start position pos2 goal position duration trajectory duration (must be longer than fastest case, otherwise will be ignored)
Definition at line 129 of file velocity_profile_atrap.cpp.

◆ setProfileStartVelocity()
| bool pilz_industrial_motion_planner::VelocityProfileATrap::setProfileStartVelocity | ( | double | pos1, |
| double | pos2, | ||
| double | vel1 | ||
| ) |
Profile with start velocity Note: This function is not general and is currently only used for live control (vel1*(pos2-pos1)>0).
- Parameters
-
pos1 start position pos2 goal position vel1 start velocity
- Returns
Definition at line 207 of file velocity_profile_atrap.cpp.


◆ thirdPhaseDuration()
|
inline |
get the time of third phase
- Returns
Definition at line 136 of file velocity_profile_atrap.h.

◆ Vel()
|
override |
Get velocity at given time.
- Parameters
-
time
- Returns
Definition at line 336 of file velocity_profile_atrap.cpp.

◆ Write()
|
override |
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 397 of file velocity_profile_atrap.cpp.
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/velocity_profile_atrap.h
- moveit_planners/pilz_industrial_motion_planner/src/velocity_profile_atrap.cpp