#include <rdf_loader.h>
Public Member Functions | |
| RDFLoader (const std::shared_ptr< rclcpp::Node > &node, const std::string &ros_name="robot_description", bool default_continuous_value=false, double default_timeout=10.0) | |
| Default constructor. More... | |
| RDFLoader (const std::string &urdf_string, const std::string &srdf_string) | |
| Initialize the robot model from a string representation of the URDF and SRDF documents. More... | |
| const std::string & | getRobotDescription () const |
| Get the resolved parameter name for the robot description. More... | |
| const urdf::ModelInterfaceSharedPtr & | getURDF () const |
| Get the parsed URDF model. More... | |
| const srdf::ModelSharedPtr & | getSRDF () const |
| Get the parsed SRDF model. More... | |
| void | setNewModelCallback (const NewModelCallback &cb) |
Static Public Member Functions | |
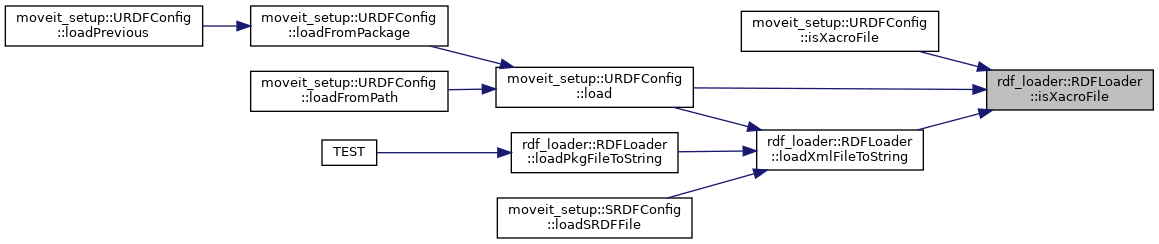
| static bool | isXacroFile (const std::string &path) |
| determine if given path points to a xacro file More... | |
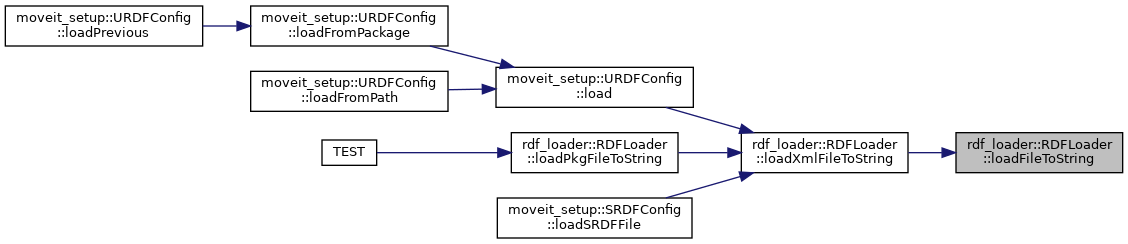
| static bool | loadFileToString (std::string &buffer, const std::string &path) |
| load file from given path into buffer More... | |
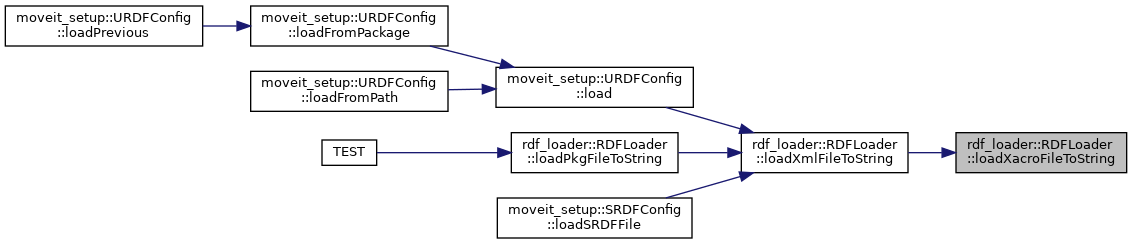
| static bool | loadXacroFileToString (std::string &buffer, const std::string &path, const std::vector< std::string > &xacro_args) |
| run xacro with the given args on the file, return result in buffer More... | |
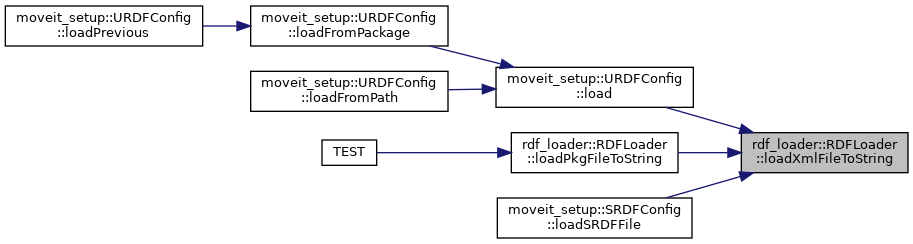
| static bool | loadXmlFileToString (std::string &buffer, const std::string &path, const std::vector< std::string > &xacro_args) |
| helper that branches between loadFileToString() and loadXacroFileToString() based on result of isXacroFile() More... | |
| static bool | loadPkgFileToString (std::string &buffer, const std::string &package_name, const std::string &relative_path, const std::vector< std::string > &xacro_args) |
| helper that generates a file path based on package name and relative file path to package More... | |
Detailed Description
Definition at line 53 of file rdf_loader.h.
Constructor & Destructor Documentation
◆ RDFLoader() [1/2]
| rdf_loader::RDFLoader::RDFLoader | ( | const std::shared_ptr< rclcpp::Node > & | node, |
| const std::string & | ros_name = "robot_description", |
||
| bool | default_continuous_value = false, |
||
| double | default_timeout = 10.0 |
||
| ) |
Default constructor.
Loads the URDF from a parameter given by the string argument, and the SRDF that has the same name + the "_semantic" suffix
If the parameter does not exist, attempt to subscribe to topics with the same name and type std_msgs::msg::String.
(specifying default_continuous_value/default_timeout allows users to specify values without setting ros parameters)
- Parameters
-
node ROS interface for parameters / topics ros_name The string name corresponding to the URDF default_continuous_value Default value for parameter with "_continuous" suffix. default_timeout Default value for parameter with "_timeout" suffix.
Definition at line 60 of file rdf_loader.cpp.

◆ RDFLoader() [2/2]
| rdf_loader::RDFLoader::RDFLoader | ( | const std::string & | urdf_string, |
| const std::string & | srdf_string | ||
| ) |
Initialize the robot model from a string representation of the URDF and SRDF documents.
Definition at line 83 of file rdf_loader.cpp.
Member Function Documentation
◆ getRobotDescription()
|
inline |
Get the resolved parameter name for the robot description.
Definition at line 79 of file rdf_loader.h.

◆ getSRDF()
|
inline |
Get the parsed SRDF model.
Definition at line 91 of file rdf_loader.h.

◆ getURDF()
|
inline |
Get the parsed URDF model.
Definition at line 85 of file rdf_loader.h.

◆ isXacroFile()
|
static |
determine if given path points to a xacro file
Definition at line 113 of file rdf_loader.cpp.
◆ loadFileToString()
|
static |
load file from given path into buffer
Definition at line 121 of file rdf_loader.cpp.
◆ loadPkgFileToString()
|
static |
helper that generates a file path based on package name and relative file path to package
Definition at line 210 of file rdf_loader.cpp.


◆ loadXacroFileToString()
|
static |
run xacro with the given args on the file, return result in buffer
Definition at line 152 of file rdf_loader.cpp.
◆ loadXmlFileToString()
|
static |
helper that branches between loadFileToString() and loadXacroFileToString() based on result of isXacroFile()
Definition at line 199 of file rdf_loader.cpp.

◆ setNewModelCallback()
|
inline |
Definition at line 96 of file rdf_loader.h.
The documentation for this class was generated from the following files:
- moveit_ros/planning/rdf_loader/include/moveit/rdf_loader/rdf_loader.h
- moveit_ros/planning/rdf_loader/src/rdf_loader.cpp