#include <robot_model_loader.h>
Classes | |
| struct | Options |
| Structure that encodes the options to be passed to the RobotModelLoader constructor. More... | |
Public Member Functions | |
| RobotModelLoader (const rclcpp::Node::SharedPtr &node, const Options &opt=Options()) | |
| Default constructor. More... | |
| RobotModelLoader (const rclcpp::Node::SharedPtr &node, const std::string &robot_description, bool load_kinematics_solvers=true) | |
| ~RobotModelLoader () | |
| const moveit::core::RobotModelPtr & | getModel () const |
| Get the constructed planning_models::RobotModel. More... | |
| const std::string & | getRobotDescription () const |
| Get the resolved parameter name for the robot description. More... | |
| const urdf::ModelInterfaceSharedPtr & | getURDF () const |
| Get the parsed URDF model. More... | |
| const srdf::ModelSharedPtr & | getSRDF () const |
| Get the parsed SRDF model. More... | |
| const rdf_loader::RDFLoaderPtr & | getRDFLoader () const |
| Get the instance of rdf_loader::RDFLoader that was used to load the robot description. More... | |
| const kinematics_plugin_loader::KinematicsPluginLoaderPtr & | getKinematicsPluginLoader () const |
| Get the kinematics solvers plugin loader. More... | |
| void | loadKinematicsSolvers (const kinematics_plugin_loader::KinematicsPluginLoaderPtr &kloader=kinematics_plugin_loader::KinematicsPluginLoaderPtr()) |
| Load the kinematics solvers into the kinematic model. This is done by default, unless disabled explicitly by the options passed to the constructor. More... | |
Detailed Description
Definition at line 49 of file robot_model_loader.h.
Constructor & Destructor Documentation
◆ RobotModelLoader() [1/2]
| robot_model_loader::RobotModelLoader::RobotModelLoader | ( | const rclcpp::Node::SharedPtr & | node, |
| const Options & | opt = Options() |
||
| ) |
Default constructor.
Definition at line 59 of file robot_model_loader.cpp.
◆ RobotModelLoader() [2/2]
| robot_model_loader::RobotModelLoader::RobotModelLoader | ( | const rclcpp::Node::SharedPtr & | node, |
| const std::string & | robot_description, | ||
| bool | load_kinematics_solvers = true |
||
| ) |
Definition at line 50 of file robot_model_loader.cpp.
◆ ~RobotModelLoader()
| robot_model_loader::RobotModelLoader::~RobotModelLoader | ( | ) |
Definition at line 64 of file robot_model_loader.cpp.
Member Function Documentation
◆ getKinematicsPluginLoader()
|
inline |
Get the kinematics solvers plugin loader.
- Note
- This instance needs to be kept in scope, otherwise kinematics solver plugins may get unloaded.
Definition at line 119 of file robot_model_loader.h.
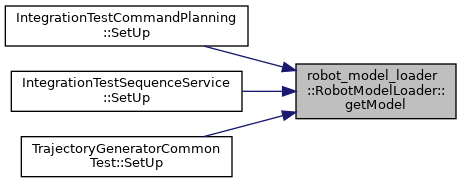
◆ getModel()
|
inline |
Get the constructed planning_models::RobotModel.
Definition at line 88 of file robot_model_loader.h.
◆ getRDFLoader()
|
inline |
Get the instance of rdf_loader::RDFLoader that was used to load the robot description.
Definition at line 112 of file robot_model_loader.h.
◆ getRobotDescription()
|
inline |
Get the resolved parameter name for the robot description.
Definition at line 94 of file robot_model_loader.h.
◆ getSRDF()
|
inline |
Get the parsed SRDF model.
Definition at line 106 of file robot_model_loader.h.
◆ getURDF()
|
inline |
Get the parsed URDF model.
Definition at line 100 of file robot_model_loader.h.
◆ loadKinematicsSolvers()
| void robot_model_loader::RobotModelLoader::loadKinematicsSolvers | ( | const kinematics_plugin_loader::KinematicsPluginLoaderPtr & | kloader = kinematics_plugin_loader::KinematicsPluginLoaderPtr() | ) |
Load the kinematics solvers into the kinematic model. This is done by default, unless disabled explicitly by the options passed to the constructor.
Definition at line 251 of file robot_model_loader.cpp.

The documentation for this class was generated from the following files:
- moveit_ros/planning/robot_model_loader/include/moveit/robot_model_loader/robot_model_loader.h
- moveit_ros/planning/robot_model_loader/src/robot_model_loader.cpp