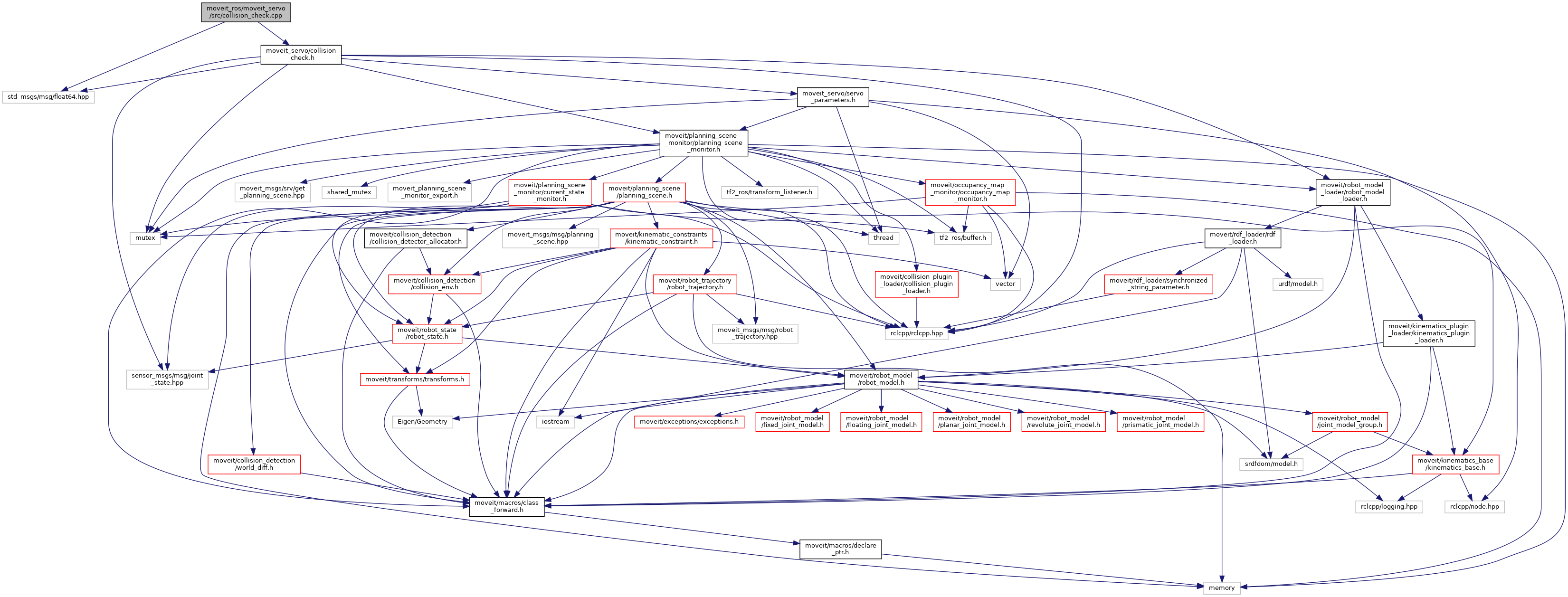
Include dependency graph for collision_check.cpp:
Go to the source code of this file.
Namespaces | |
| moveit_servo | |
Variables | |
| constexpr size_t | ROS_LOG_THROTTLE_PERIOD = 30 * 1000 |
Variable Documentation
◆ ROS_LOG_THROTTLE_PERIOD
|
constexpr |
Definition at line 47 of file collision_check.cpp.