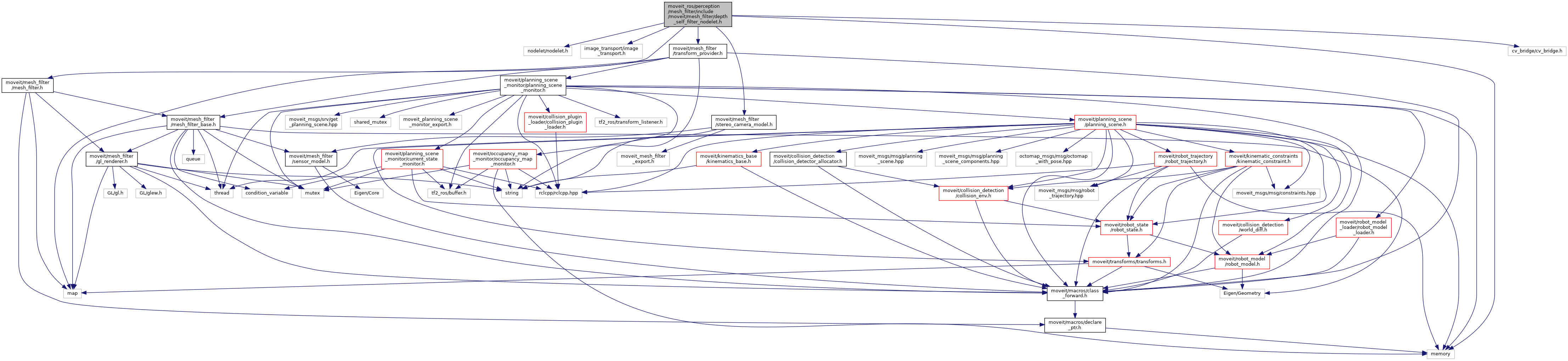
#include <nodelet/nodelet.h>#include <image_transport/image_transport.h>#include <moveit/mesh_filter/transform_provider.h>#include <moveit/mesh_filter/mesh_filter.h>#include <moveit/mesh_filter/stereo_camera_model.h>#include <cv_bridge/cv_bridge.h>#include <memory>
Include dependency graph for depth_self_filter_nodelet.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mesh_filter::DepthSelfFiltering |
| Nodelet for filtering meshes from depth images. e.g. meshes of the robot or any attached object where a transformation can be provided for. More... | |
Namespaces | |
| mesh_filter | |