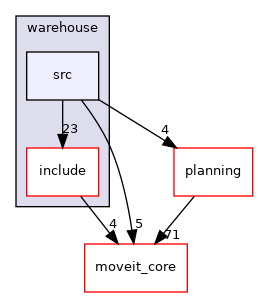
Directory dependency graph for src:
Files | |
| file | broadcast.cpp [code] |
| file | constraints_storage.cpp [code] |
| file | db_path_config.py [code] |
| file | import_from_text.cpp [code] |
| file | initialize_demo_db.cpp [code] |
| file | planning_scene_storage.cpp [code] |
| file | planning_scene_world_storage.cpp [code] |
| file | save_as_text.cpp [code] |
| file | save_to_warehouse.cpp [code] |
| file | state_storage.cpp [code] |
| file | trajectory_constraints_storage.cpp [code] |
| file | warehouse_connector.cpp [code] |
| file | warehouse_services.cpp [code] |