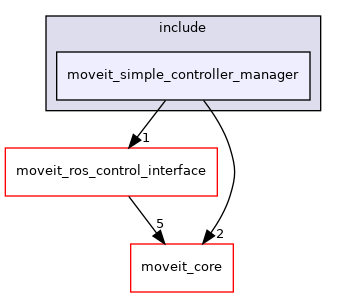
Directory dependency graph for moveit_simple_controller_manager:
Files | |
| file | action_based_controller_handle.h [code] |
| file | empty_controller_handle.h [code] |
| file | follow_joint_trajectory_controller_handle.h [code] |
| file | gripper_controller_handle.h [code] |