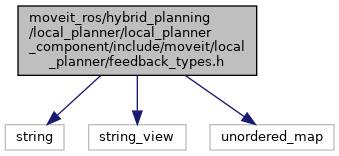
#include <string>#include <string_view>#include <unordered_map>
Include dependency graph for feedback_types.h:
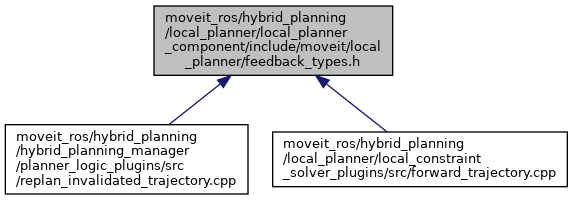
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| moveit | |
| Main namespace for MoveIt. | |
| moveit::hybrid_planning | |
Enumerations | |
| enum | moveit::hybrid_planning::LocalFeedbackEnum { moveit::hybrid_planning::COLLISION_AHEAD = 1 , moveit::hybrid_planning::LOCAL_PLANNER_STUCK = 2 } |
| Expected feedback types. More... | |
Functions | |
| constexpr std::string_view | moveit::hybrid_planning::toString (const LocalFeedbackEnum &code) |