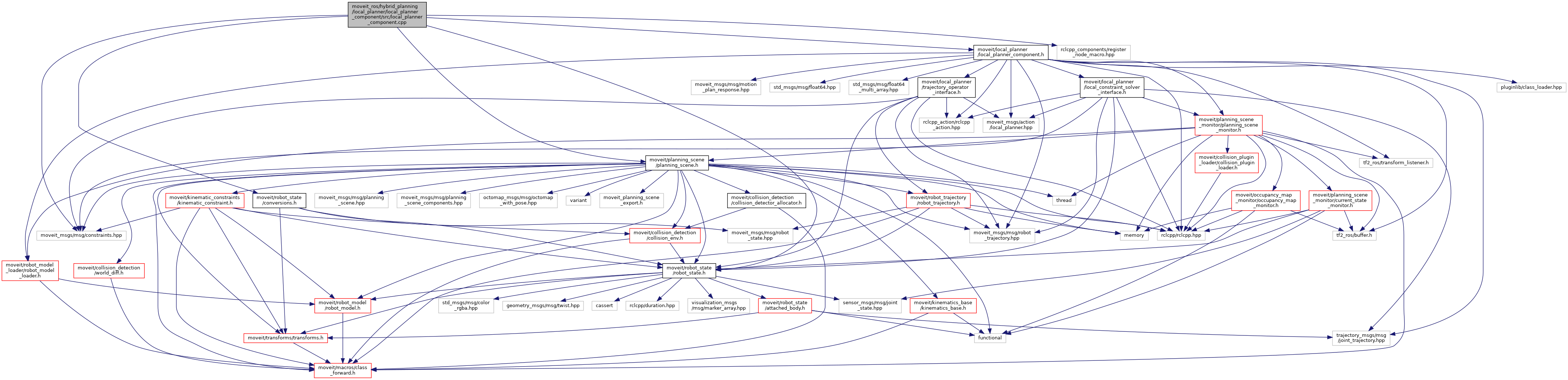
#include <moveit/local_planner/local_planner_component.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_state/conversions.h>#include <moveit_msgs/msg/constraints.hpp>#include <rclcpp_components/register_node_macro.hpp>
Include dependency graph for local_planner_component.cpp:
Go to the source code of this file.
Namespaces | |
| moveit | |
| Main namespace for MoveIt. | |
| moveit::hybrid_planning | |