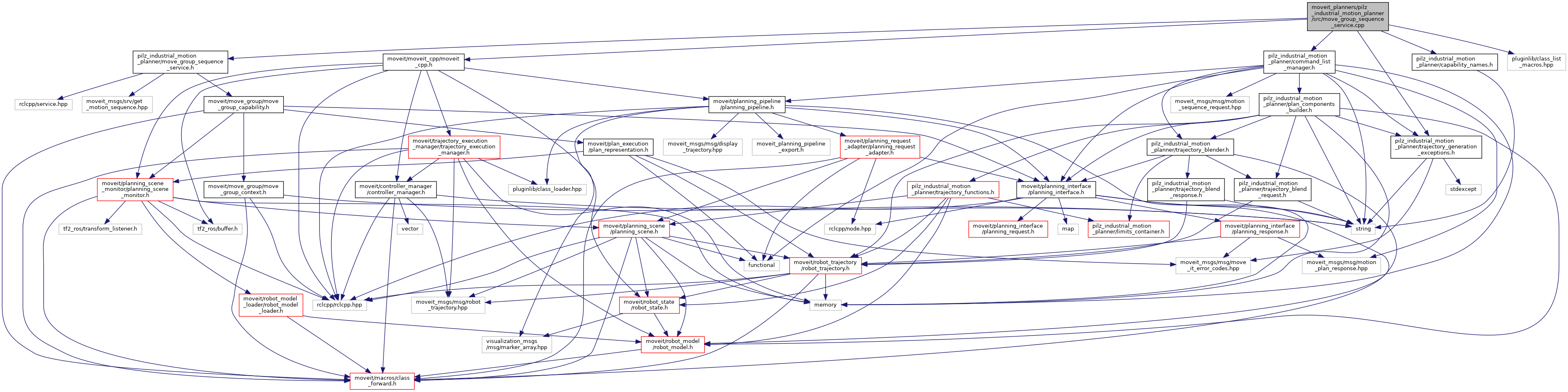
#include <pilz_industrial_motion_planner/move_group_sequence_service.h>#include <pilz_industrial_motion_planner/capability_names.h>#include <pilz_industrial_motion_planner/command_list_manager.h>#include <pilz_industrial_motion_planner/trajectory_generation_exceptions.h>#include <moveit/moveit_cpp/moveit_cpp.h>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for move_group_sequence_service.cpp:
Go to the source code of this file.
Namespaces | |
| pilz_industrial_motion_planner | |