Classes | |
| class | DeclareBooleanLaunchArg |
Functions | |
| def | add_debuggable_node (ld, package, executable, condition_name="debug", commands_file=None, extra_debug_args=None, **kwargs) |
Function Documentation
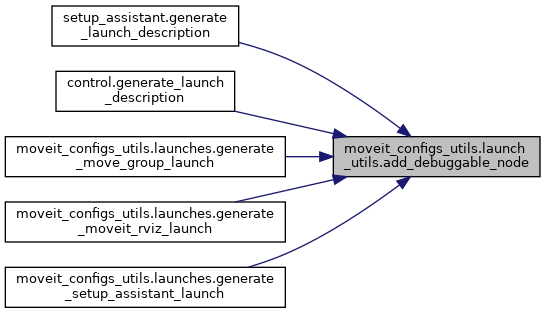
◆ add_debuggable_node()
| def moveit_configs_utils.launch_utils.add_debuggable_node | ( | ld, | |
| package, | |||
| executable, | |||
condition_name = "debug", |
|||
commands_file = None, |
|||
extra_debug_args = None, |
|||
| ** | kwargs | ||
| ) |
Adds two versions of a Node to the launch description, one with gdb debugging, controlled by a launch config
Definition at line 21 of file launch_utils.py.
Here is the caller graph for this function: