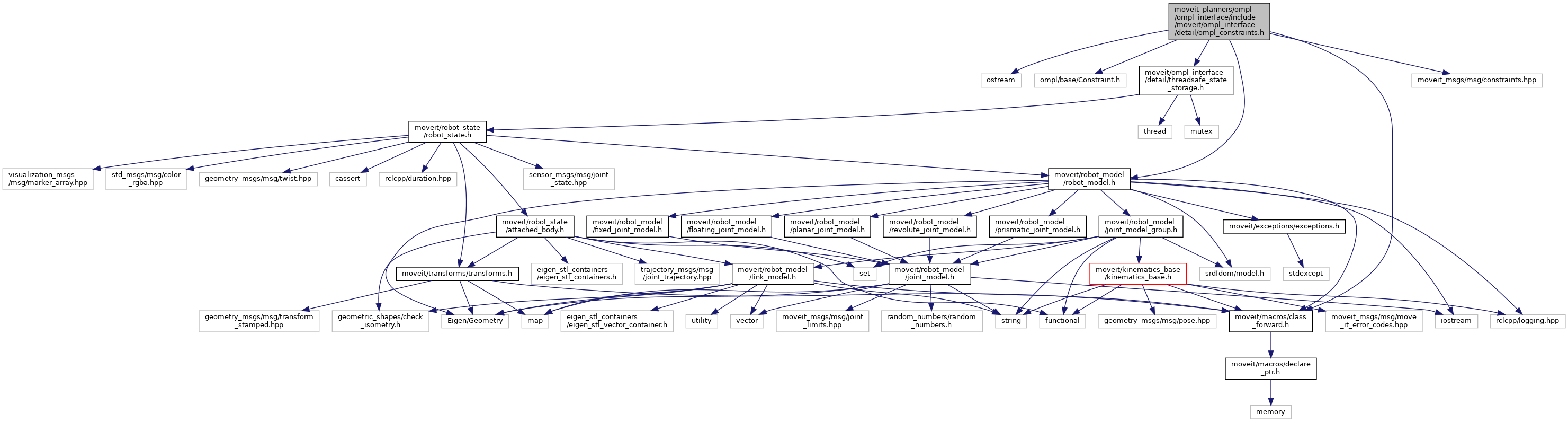
#include <ostream>#include <ompl/base/Constraint.h>#include <moveit/ompl_interface/detail/threadsafe_state_storage.h>#include <moveit/robot_model/robot_model.h>#include <moveit/macros/class_forward.h>#include <moveit_msgs/msg/constraints.hpp>
Include dependency graph for ompl_constraints.h:
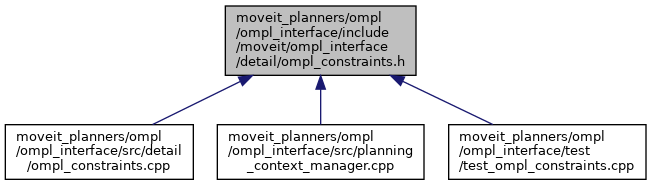
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ompl_interface::Bounds |
| Represents upper and lower bound on the elements of a vector. More... | |
| class | ompl_interface::BaseConstraint |
| Abstract base class for different types of constraints, implementations of ompl::base::Constraint. More... | |
| class | ompl_interface::BoxConstraint |
| Box shaped position constraints. More... | |
| class | ompl_interface::EqualityPositionConstraint |
| Equality constraints on a link's position. More... | |
| class | ompl_interface::OrientationConstraint |
| Orientation constraints parameterized using exponential coordinates. More... | |
Namespaces | |
| ompl_interface | |
| The MoveIt interface to OMPL. | |
Functions | |
| ompl_interface::MOVEIT_CLASS_FORWARD (BaseConstraint) | |
| ompl_interface::MOVEIT_CLASS_FORWARD (BoxConstraint) | |
| ompl_interface::MOVEIT_CLASS_FORWARD (OrientationConstraint) | |
| std::ostream & | ompl_interface::operator<< (std::ostream &os, const ompl_interface::Bounds &bounds) |
| Pretty printing of bounds. More... | |
| Bounds | ompl_interface::positionConstraintMsgToBoundVector (const moveit_msgs::msg::PositionConstraint &pos_con) |
| Extract position constraints from the MoveIt message. More... | |
| Bounds | ompl_interface::orientationConstraintMsgToBoundVector (const moveit_msgs::msg::OrientationConstraint &ori_con) |
| Extract orientation constraints from the MoveIt message. More... | |
| ompl::base::ConstraintPtr | ompl_interface::createOMPLConstraints (const moveit::core::RobotModelConstPtr &robot_model, const std::string &group, const moveit_msgs::msg::Constraints &constraints) |
| Factory to create constraints based on what is in the MoveIt constraint message. More... | |
| Eigen::Matrix3d | ompl_interface::angularVelocityToAngleAxis (const double &angle, const Eigen::Ref< const Eigen::Vector3d > &axis) |
| Return a matrix to convert angular velocity to angle-axis velocity Based on: https://ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/rsl-dam/documents/RobotDynamics2016/RD2016script.pdf Eq. 2.107. More... | |