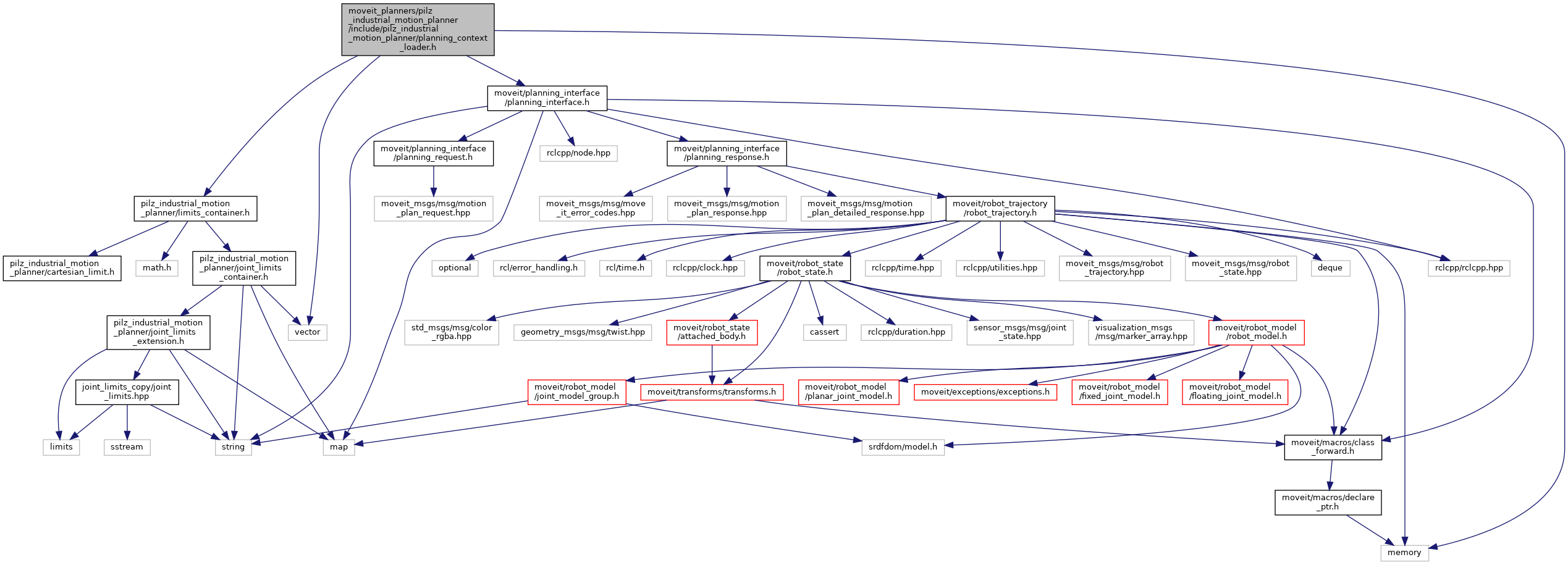
#include <pilz_industrial_motion_planner/limits_container.h>#include <memory>#include <vector>#include <moveit/planning_interface/planning_interface.h>
Include dependency graph for planning_context_loader.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::PlanningContextLoader |
| Base class for all PlanningContextLoaders. Since planning_interface::PlanningContext has a non empty ctor, classes derived from it can not be plugins. This class serves as base class for wrappers. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |
Typedefs | |
| typedef std::shared_ptr< PlanningContextLoader > | pilz_industrial_motion_planner::PlanningContextLoaderPtr |
| typedef std::shared_ptr< const PlanningContextLoader > | pilz_industrial_motion_planner::PlanningContextLoaderConstPtr |