moveit2
The MoveIt Motion Planning Framework for ROS 2.
moveit_planners
pilz_industrial_motion_planner
include
pilz_industrial_motion_planner
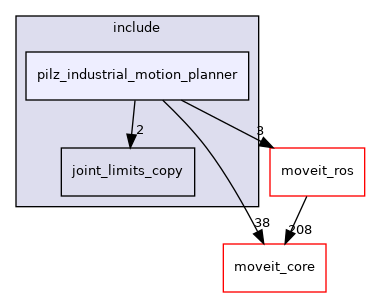
pilz_industrial_motion_planner Directory Reference
Directory dependency graph for pilz_industrial_motion_planner:
Files
file
capability_names.h
[code]
file
cartesian_limit.h
[code]
file
cartesian_limits_aggregator.h
[code]
file
cartesian_trajectory.h
[code]
file
cartesian_trajectory_point.h
[code]
file
command_list_manager.h
[code]
file
joint_limits_aggregator.h
[code]
file
joint_limits_container.h
[code]
file
joint_limits_extension.h
[code]
file
joint_limits_interface_extension.h
[code]
file
joint_limits_validator.h
[code]
file
limits_container.h
[code]
file
move_group_sequence_action.h
[code]
file
move_group_sequence_service.h
[code]
file
path_circle_generator.h
[code]
file
pilz_industrial_motion_planner.h
[code]
file
plan_components_builder.h
[code]
file
planning_context_base.h
[code]
file
planning_context_circ.h
[code]
file
planning_context_lin.h
[code]
file
planning_context_loader.h
[code]
file
planning_context_loader_circ.h
[code]
file
planning_context_loader_lin.h
[code]
file
planning_context_loader_ptp.h
[code]
file
planning_context_ptp.h
[code]
file
planning_exceptions.h
[code]
file
tip_frame_getter.h
[code]
file
trajectory_blend_request.h
[code]
file
trajectory_blend_response.h
[code]
file
trajectory_blender.h
[code]
file
trajectory_blender_transition_window.h
[code]
file
trajectory_functions.h
[code]
file
trajectory_generation_exceptions.h
[code]
file
trajectory_generator.h
[code]
file
trajectory_generator_circ.h
[code]
file
trajectory_generator_lin.h
[code]
file
trajectory_generator_ptp.h
[code]
file
velocity_profile_atrap.h
[code]
Generated by
1.9.1