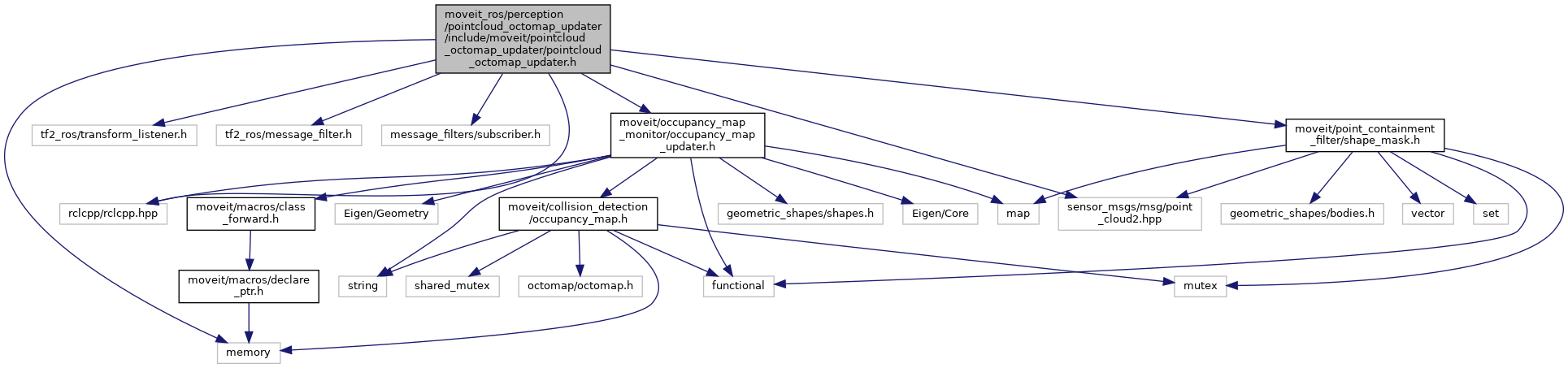
#include <rclcpp/rclcpp.hpp>#include <rclcpp/callback_group.hpp>#include <tf2_ros/transform_listener.h>#include <tf2_ros/message_filter.h>#include <message_filters/subscriber.h>#include <sensor_msgs/msg/point_cloud2.hpp>#include <moveit/occupancy_map_monitor/occupancy_map_updater.h>#include <moveit/point_containment_filter/shape_mask.h>#include <memory>
Include dependency graph for pointcloud_octomap_updater.h:
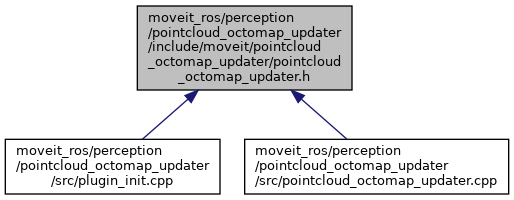
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | occupancy_map_monitor::PointCloudOctomapUpdater |
Namespaces | |
| occupancy_map_monitor | |