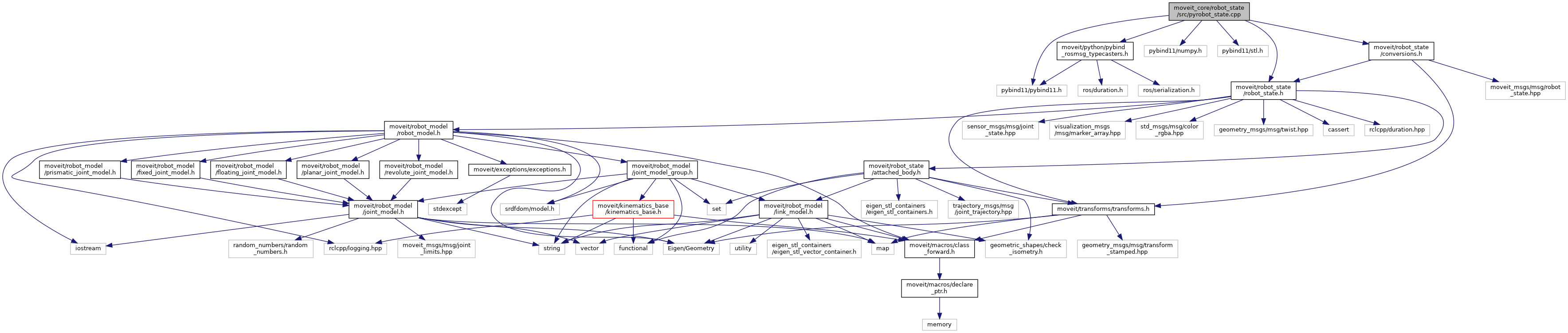
#include <pybind11/pybind11.h>#include <pybind11/numpy.h>#include <pybind11/stl.h>#include <moveit/python/pybind_rosmsg_typecasters.h>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_state/conversions.h>
Include dependency graph for pyrobot_state.cpp:
Go to the source code of this file.
Functions | |
| void | def_robot_state_bindings (py::module &m) |
Function Documentation
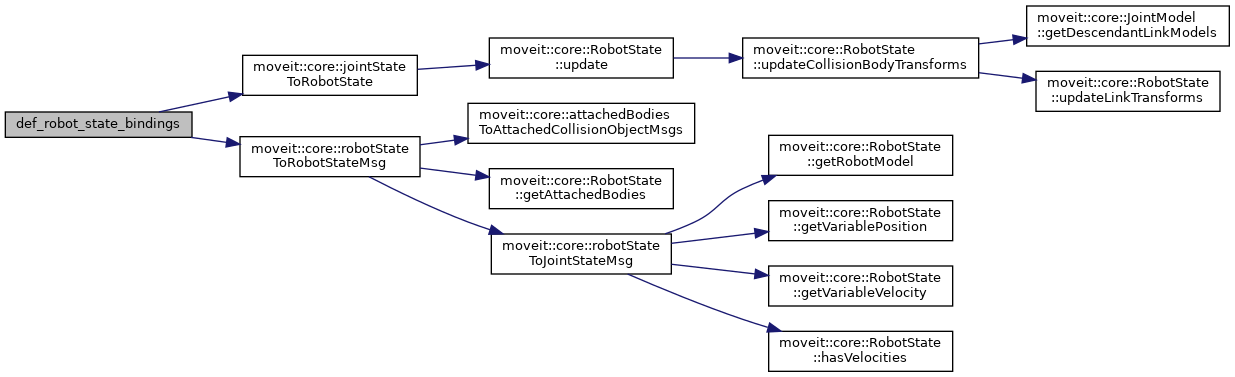
◆ def_robot_state_bindings()
| void def_robot_state_bindings | ( | py::module & | m | ) |
Definition at line 48 of file pyrobot_state.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
