#include <vector>#include <map>#include <ros/ros.h>#include <gtest/gtest.h>#include <moveit/planning_scene_interface/planning_scene_interface.h>#include <moveit/planning_scene_monitor/planning_scene_monitor.h>#include <moveit/move_group_interface/move_group_interface.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <tf2_eigen/tf2_eigen.hpp>
Include dependency graph for subframes_test.cpp:

Go to the source code of this file.
Functions | |
| bool | moveToCartPose (const geometry_msgs::PoseStamped &pose, moveit::planning_interface::MoveGroupInterface &group, const std::string &end_effector_link) |
| bool | moveCartesianPath (const geometry_msgs::PoseStamped &pose, moveit::planning_interface::MoveGroupInterface &group, const std::string &end_effector_link) |
| void | spawnCollisionObjects (moveit::planning_interface::PlanningSceneInterface &planning_scene_interface) |
| TEST (TestPlanUsingSubframes, SubframesTests) | |
| TEST (TestPlanUsingSubframes, SubframesCartesianPathTests) | |
| int | main (int argc, char **argv) |
Variables | |
| constexpr double | EPSILON = 1e-2 |
| constexpr double | Z_OFFSET = 0.05 |
| constexpr double | PLANNING_TIME_S = 30.0 |
| const double | TAU = 2 * M_PI |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 297 of file subframes_test.cpp.
◆ moveCartesianPath()
| bool moveCartesianPath | ( | const geometry_msgs::PoseStamped & | pose, |
| moveit::planning_interface::MoveGroupInterface & | group, | ||
| const std::string & | end_effector_link | ||
| ) |

◆ moveToCartPose()
| bool moveToCartPose | ( | const geometry_msgs::PoseStamped & | pose, |
| moveit::planning_interface::MoveGroupInterface & | group, | ||
| const std::string & | end_effector_link | ||
| ) |

◆ spawnCollisionObjects()
| void spawnCollisionObjects | ( | moveit::planning_interface::PlanningSceneInterface & | planning_scene_interface | ) |
Definition at line 127 of file subframes_test.cpp.
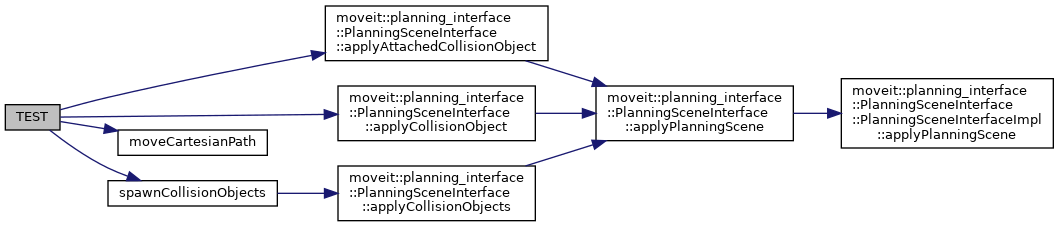
Here is the call graph for this function:

Here is the caller graph for this function:

◆ TEST() [1/2]
| TEST | ( | TestPlanUsingSubframes | , |
| SubframesCartesianPathTests | |||
| ) |
◆ TEST() [2/2]
| TEST | ( | TestPlanUsingSubframes | , |
| SubframesTests | |||
| ) |

Variable Documentation
◆ EPSILON
|
constexpr |
Definition at line 61 of file subframes_test.cpp.
◆ PLANNING_TIME_S
|
constexpr |
Definition at line 63 of file subframes_test.cpp.
◆ TAU
| const double TAU = 2 * M_PI |
Definition at line 65 of file subframes_test.cpp.
◆ Z_OFFSET
|
constexpr |
Definition at line 62 of file subframes_test.cpp.