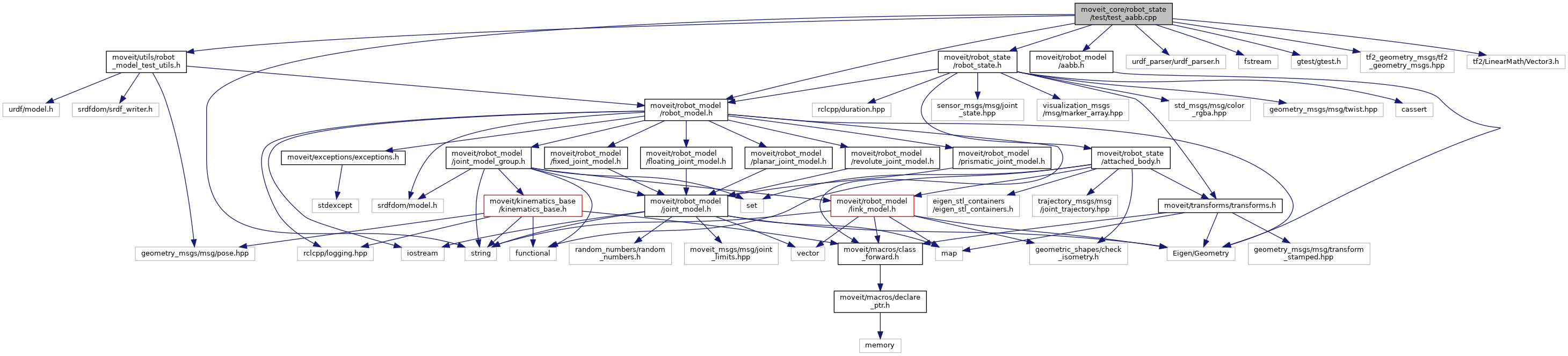
#include <moveit/robot_model/aabb.h>
#include <moveit/robot_model/robot_model.h>
#include <moveit/robot_state/robot_state.h>
#include <urdf_parser/urdf_parser.h>
#include <fstream>
#include <string>
#include <gtest/gtest.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
#include <tf2/LinearMath/Vector3.h>
#include <moveit/utils/robot_model_test_utils.h>
Go to the source code of this file.
◆ VISUALIZE_PR2_RVIZ
| #define VISUALIZE_PR2_RVIZ 0 |
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
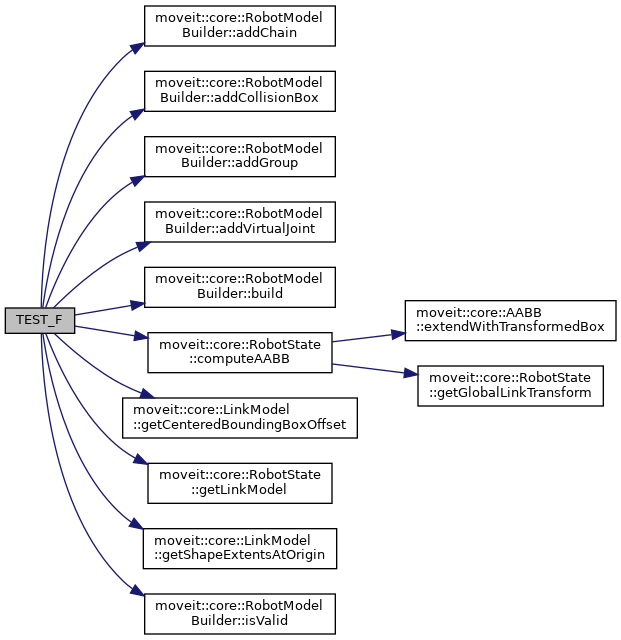
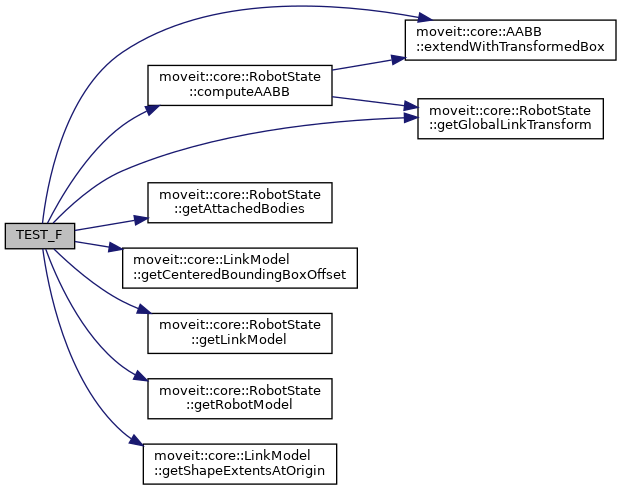
◆ TEST_F() [1/3]
◆ TEST_F() [2/3]
◆ TEST_F() [3/3]