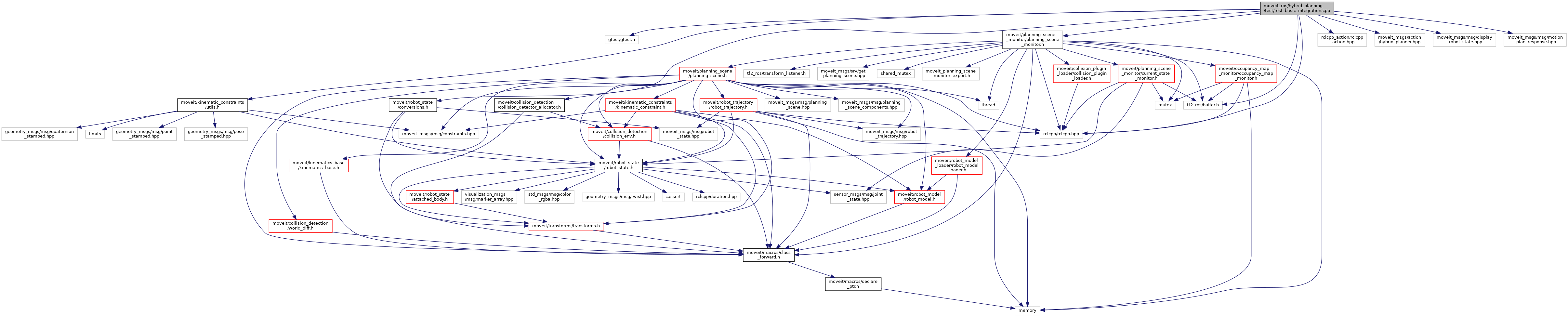
#include <gtest/gtest.h>
#include <moveit/kinematic_constraints/utils.h>
#include <moveit/planning_scene_monitor/planning_scene_monitor.h>
#include <moveit/robot_state/conversions.h>
#include <rclcpp/rclcpp.hpp>
#include <rclcpp_action/rclcpp_action.hpp>
#include <tf2_ros/buffer.h>
#include <moveit_msgs/action/hybrid_planner.hpp>
#include <moveit_msgs/msg/display_robot_state.hpp>
#include <moveit_msgs/msg/motion_plan_response.hpp>
Go to the source code of this file.
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |