#include <memory>#include <string>#include <iostream>#include <gtest/gtest.h>#include <Eigen/Dense>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_state/conversions.h>#include <moveit/utils/robot_model_test_utils.h>#include <moveit/ompl_interface/parameterization/joint_space/constrained_planning_state_space.h>#include <moveit_msgs/msg/constraints.hpp>#include <ompl/util/Exception.h>#include <ompl/base/spaces/RealVectorStateSpace.h>#include <ompl/base/spaces/constraint/ProjectedStateSpace.h>#include "load_test_robot.h"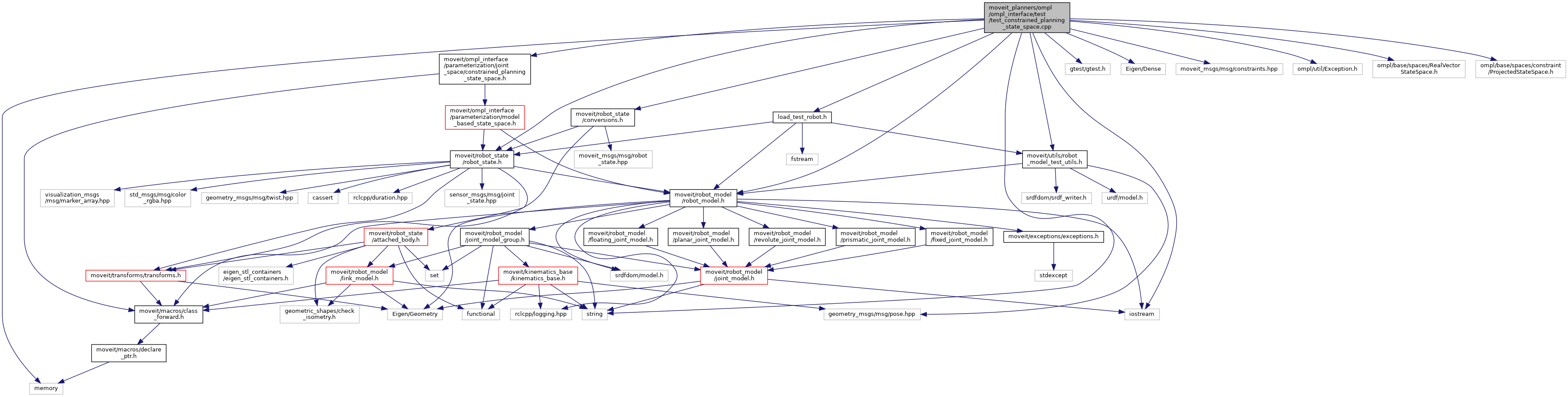
Go to the source code of this file.
Classes | |
| class | DummyConstraint |
| Dummy constraint for testing, always satisfied. We need this to create and OMPL ConstrainedStateSpace. More... | |
| class | TestConstrainedStateSpace |
| Robot indepentent implementation of the tests. More... | |
| class | PandaCopyStateTest |
| class | FanucCopyStateTest |
| class | PR2CopyStateTest |
Functions | |
| TEST_F (PandaCopyStateTest, testGetValueAddressAtIndex) | |
| TEST_F (PandaCopyStateTest, testCopyToRobotState) | |
| TEST_F (PandaCopyStateTest, testCopyToOMPLState) | |
| TEST_F (PandaCopyStateTest, testCopyJointToOMPLState) | |
| TEST_F (FanucCopyStateTest, testGetValueAddressAtIndex) | |
| TEST_F (FanucCopyStateTest, testCopyToRobotState) | |
| TEST_F (FanucCopyStateTest, testCopyToOMPLState) | |
| TEST_F (FanucCopyStateTest, testCopyJointToOMPLState) | |
| TEST_F (PR2CopyStateTest, testGetValueAddressAtIndex) | |
| TEST_F (PR2CopyStateTest, testCopyToRobotState) | |
| TEST_F (PR2CopyStateTest, testCopyToOMPLState) | |
| TEST_F (PR2CopyStateTest, testCopyJointToOMPLState) | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 337 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [1/12]
| TEST_F | ( | FanucCopyStateTest | , |
| testCopyJointToOMPLState | |||
| ) |
Definition at line 298 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [2/12]
| TEST_F | ( | FanucCopyStateTest | , |
| testCopyToOMPLState | |||
| ) |
Definition at line 293 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [3/12]
| TEST_F | ( | FanucCopyStateTest | , |
| testCopyToRobotState | |||
| ) |
Definition at line 288 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [4/12]
| TEST_F | ( | FanucCopyStateTest | , |
| testGetValueAddressAtIndex | |||
| ) |
Definition at line 283 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [5/12]
| TEST_F | ( | PandaCopyStateTest | , |
| testCopyJointToOMPLState | |||
| ) |
Definition at line 267 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [6/12]
| TEST_F | ( | PandaCopyStateTest | , |
| testCopyToOMPLState | |||
| ) |
Definition at line 262 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [7/12]
| TEST_F | ( | PandaCopyStateTest | , |
| testCopyToRobotState | |||
| ) |
Definition at line 257 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [8/12]
| TEST_F | ( | PandaCopyStateTest | , |
| testGetValueAddressAtIndex | |||
| ) |
Definition at line 252 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [9/12]
| TEST_F | ( | PR2CopyStateTest | , |
| testCopyJointToOMPLState | |||
| ) |
Definition at line 329 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [10/12]
| TEST_F | ( | PR2CopyStateTest | , |
| testCopyToOMPLState | |||
| ) |
Definition at line 324 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [11/12]
| TEST_F | ( | PR2CopyStateTest | , |
| testCopyToRobotState | |||
| ) |
Definition at line 319 of file test_constrained_planning_state_space.cpp.
◆ TEST_F() [12/12]
| TEST_F | ( | PR2CopyStateTest | , |
| testGetValueAddressAtIndex | |||
| ) |
Definition at line 314 of file test_constrained_planning_state_space.cpp.