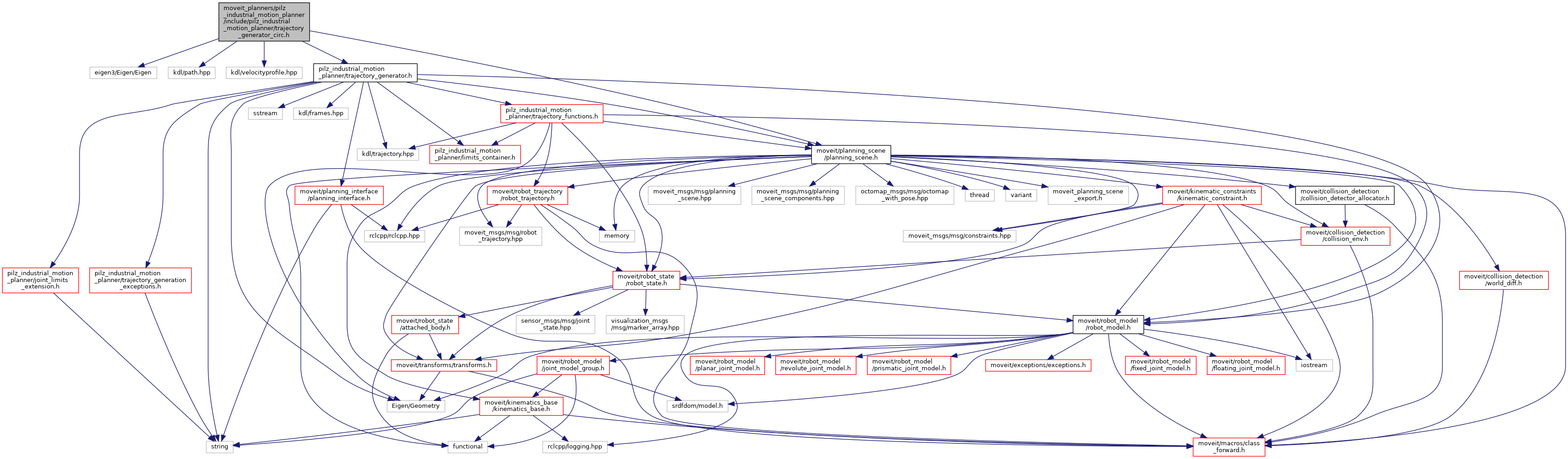
#include <eigen3/Eigen/Eigen>#include <kdl/path.hpp>#include <kdl/velocityprofile.hpp>#include <moveit/planning_scene/planning_scene.h>#include <pilz_industrial_motion_planner/trajectory_generator.h>
Include dependency graph for trajectory_generator_circ.h:
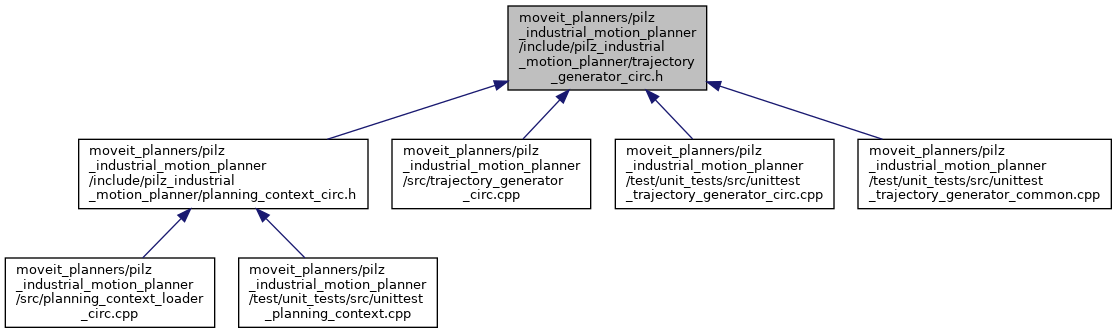
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::TrajectoryGeneratorCIRC |
| This class implements a trajectory generator of arcs in Cartesian space. The arc is specified by a start pose, a goal pose and a interim point on the arc, or a point as the center of the circle which forms the arc. Complete circle is not covered by this generator. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |
Functions | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (CircleNoPlane, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (CircleToSmall, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (CenterPointDifferentRadius, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (CircTrajectoryConversionFailure, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (UnknownPathConstraintName, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (NoPositionConstraints, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (NoPrimitivePose, moveit_msgs::msg::MoveItErrorCodes::INVALID_MOTION_PLAN) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (UnknownLinkNameOfAuxiliaryPoint, moveit_msgs::msg::MoveItErrorCodes::INVALID_LINK_NAME) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (NumberOfConstraintsMismatch, moveit_msgs::msg::MoveItErrorCodes::INVALID_GOAL_CONSTRAINTS) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (CircInverseForGoalIncalculable, moveit_msgs::msg::MoveItErrorCodes::NO_IK_SOLUTION) | |