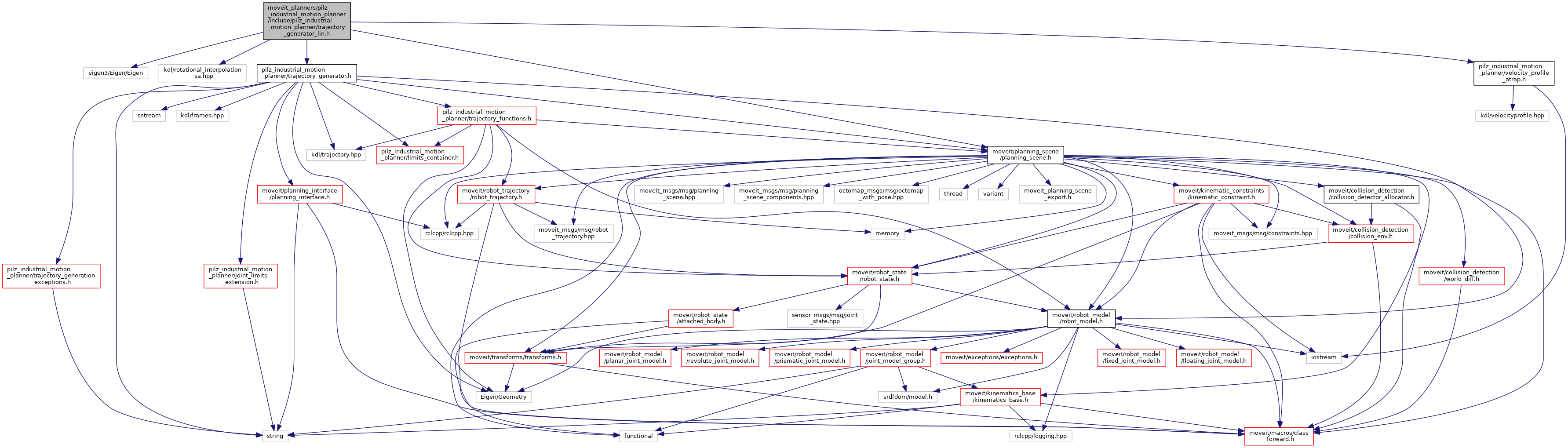
#include <eigen3/Eigen/Eigen>#include <kdl/rotational_interpolation_sa.hpp>#include <moveit/planning_scene/planning_scene.h>#include <pilz_industrial_motion_planner/trajectory_generator.h>#include <pilz_industrial_motion_planner/velocity_profile_atrap.h>
Include dependency graph for trajectory_generator_lin.h:
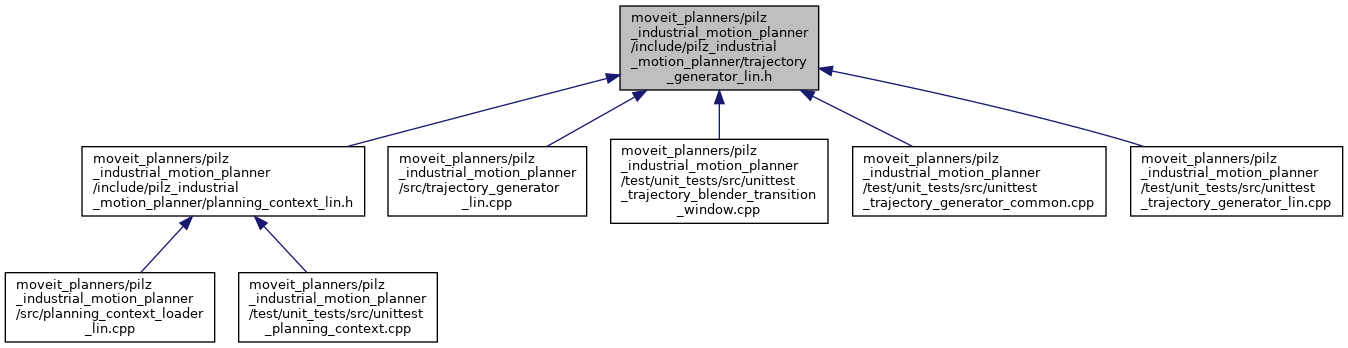
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::TrajectoryGeneratorLIN |
| This class implements a linear trajectory generator in Cartesian space. The Cartesian trajetory are based on trapezoid velocity profile. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |
Functions | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (LinTrajectoryConversionFailure, moveit_msgs::msg::MoveItErrorCodes::FAILURE) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (JointNumberMismatch, moveit_msgs::msg::MoveItErrorCodes::INVALID_GOAL_CONSTRAINTS) | |
| pilz_industrial_motion_planner::CREATE_MOVEIT_ERROR_CODE_EXCEPTION (LinInverseForGoalIncalculable, moveit_msgs::msg::MoveItErrorCodes::NO_IK_SOLUTION) | |