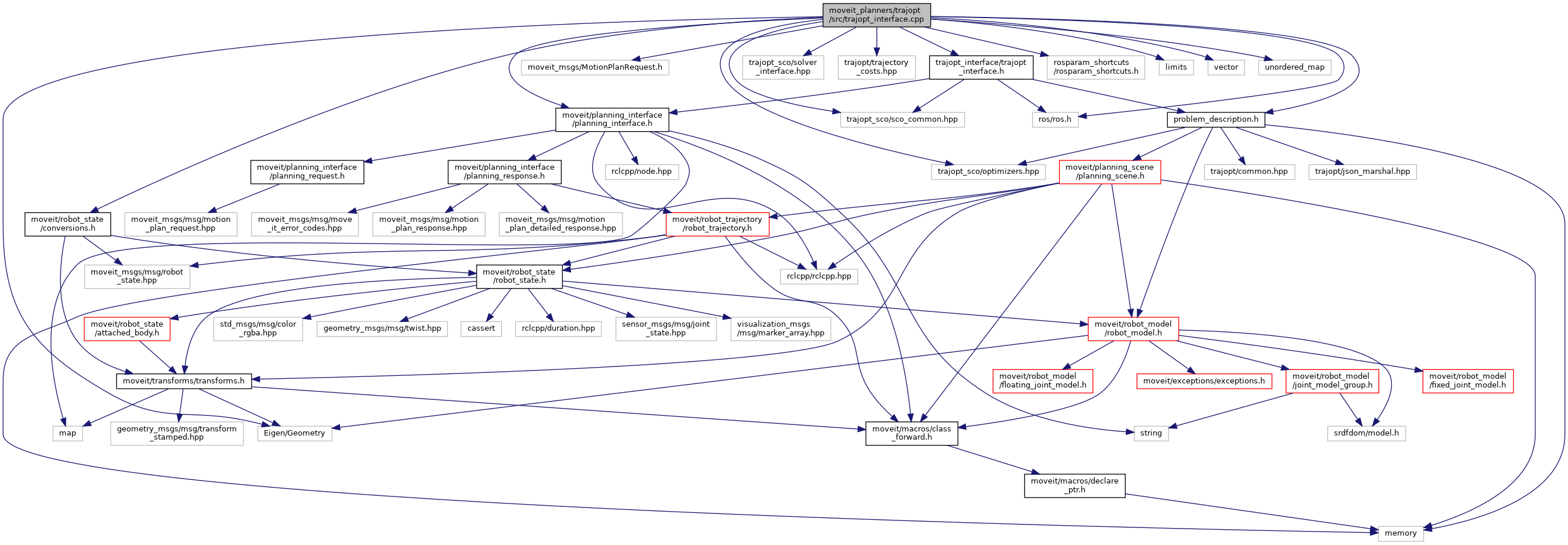
#include <moveit/planning_interface/planning_interface.h>#include <moveit/robot_state/conversions.h>#include <moveit_msgs/MotionPlanRequest.h>#include <trajopt_sco/sco_common.hpp>#include <trajopt_sco/optimizers.hpp>#include <trajopt_sco/solver_interface.hpp>#include <trajopt/trajectory_costs.hpp>#include <ros/ros.h>#include <rosparam_shortcuts/rosparam_shortcuts.h>#include <limits>#include <vector>#include <Eigen/Geometry>#include <unordered_map>#include <trajopt_interface/trajopt_interface.h>#include <trajopt_interface/problem_description.h>
Include dependency graph for trajopt_interface.cpp:
Go to the source code of this file.
Namespaces | |
| trajopt_interface | |
Functions | |
| void | trajopt_interface::callBackFunc (sco::OptProb *opt_prob, sco::OptResults &opt_res) |