Classes | |
| struct | CartPoseErrCalculator |
| Used to calculate the error for StaticCartPoseTermInfo This is converted to a cost or constraint using TrajOptCostFromErrFunc or TrajOptConstraintFromErrFunc. More... | |
| struct | JointVelErrCalculator |
| struct | JointVelJacobianCalculator |
| struct | BasicInfo |
| struct | InitInfo |
| struct | TermInfo |
| struct | ProblemInfo |
| class | TrajOptProblem |
| struct | CartPoseTermInfo |
| This term is used when the goal frame is fixed in cartesian space. More... | |
| struct | JointPoseTermInfo |
| Joint space position cost Position operates on a single point (unlike velocity, etc). This is b/c the primary usecase is joint-space position waypoints. More... | |
| struct | JointVelTermInfo |
| class | TrajOptInterface |
| class | TrajOptPlanningContext |
| class | TrajOptPlannerManager |
Enumerations | |
| enum | TermType { TT_COST = 0x1 , TT_CNT = 0x2 , TT_USE_TIME = 0x4 } |
Functions | |
| Eigen::Vector3d | quaternionRotationVector (const Eigen::Matrix3d &matrix) |
| Extracts the vector part of quaternion. More... | |
| Eigen::VectorXd | concatVector (const Eigen::VectorXd &vector_a, const Eigen::VectorXd &vector_b) |
| Appends b to a of type VectorXd. More... | |
| template<typename T > | |
| std::vector< T > | concatVector (const std::vector< T > &vector_a, const std::vector< T > &vector_b) |
| Appends b to a of type T. More... | |
| MOVEIT_CLASS_FORWARD (TermInfo) | |
| MOVEIT_CLASS_FORWARD (TrajOptProblem) | |
| MOVEIT_CLASS_FORWARD (JointPoseTermInfo) | |
| MOVEIT_CLASS_FORWARD (CartPoseTermInfo) | |
| MOVEIT_CLASS_FORWARD (JointVelTermInfo) | |
| TrajOptProblemPtr | ConstructProblem (const ProblemInfo &) |
| void | generateInitialTrajectory (const ProblemInfo &pci, const std::vector< double > ¤t_joint_values, trajopt::TrajArray &init_traj) |
| MOVEIT_CLASS_FORWARD (TrajOptInterface) | |
| void | callBackFunc (sco::OptProb *opt_prob, sco::OptResults &opt_res) |
| MOVEIT_CLASS_FORWARD (TrajOptPlanningContext) | |
Enumeration Type Documentation
◆ TermType
| Enumerator | |
|---|---|
| TT_COST | |
| TT_CNT | |
| TT_USE_TIME | |
Definition at line 58 of file problem_description.h.
Function Documentation
◆ callBackFunc()
| void trajopt_interface::callBackFunc | ( | sco::OptProb * | opt_prob, |
| sco::OptResults & | opt_res | ||
| ) |

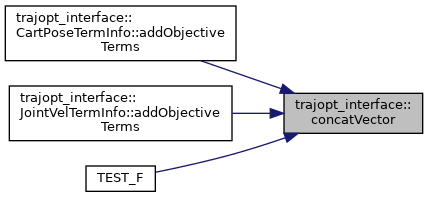
◆ concatVector() [1/2]
|
inline |
Appends b to a of type VectorXd.
Definition at line 22 of file kinematic_terms.h.
Here is the caller graph for this function:
◆ concatVector() [2/2]
template<typename T >
|
inline |
Appends b to a of type T.
Definition at line 34 of file kinematic_terms.h.
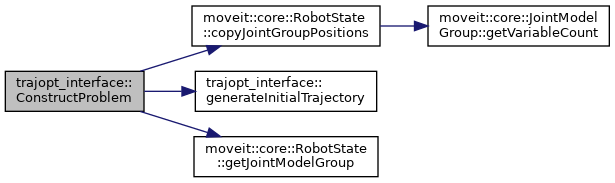
◆ ConstructProblem()
| TrajOptProblemPtr trajopt_interface::ConstructProblem | ( | const ProblemInfo & | pci | ) |
Definition at line 138 of file problem_description.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ generateInitialTrajectory()
| void trajopt_interface::generateInitialTrajectory | ( | const ProblemInfo & | pci, |
| const std::vector< double > & | current_joint_values, | ||
| trajopt::TrajArray & | init_traj | ||
| ) |

◆ MOVEIT_CLASS_FORWARD() [1/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | CartPoseTermInfo | ) |
◆ MOVEIT_CLASS_FORWARD() [2/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | JointPoseTermInfo | ) |
◆ MOVEIT_CLASS_FORWARD() [3/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | JointVelTermInfo | ) |
◆ MOVEIT_CLASS_FORWARD() [4/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | TermInfo | ) |
◆ MOVEIT_CLASS_FORWARD() [5/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | TrajOptInterface | ) |
◆ MOVEIT_CLASS_FORWARD() [6/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | TrajOptPlanningContext | ) |
◆ MOVEIT_CLASS_FORWARD() [7/7]
| trajopt_interface::MOVEIT_CLASS_FORWARD | ( | TrajOptProblem | ) |
◆ quaternionRotationVector()
|
inline |
Extracts the vector part of quaternion.
Definition at line 12 of file kinematic_terms.h.