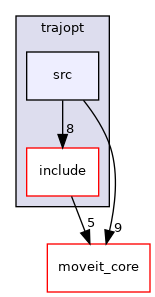
Directory dependency graph for src:
Files | |
| file | kinematic_terms.cpp [code] |
| file | problem_description.cpp [code] |
| file | trajopt_interface.cpp [code] |
| file | trajopt_planner_manager.cpp [code] |
| file | trajopt_planning_context.cpp [code] |
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
Files | |
| file | kinematic_terms.cpp [code] |
| file | problem_description.cpp [code] |
| file | trajopt_interface.cpp [code] |
| file | trajopt_planner_manager.cpp [code] |
| file | trajopt_planning_context.cpp [code] |